Содержание
>> Анализ и проектирование
>> Системы объемного гидропривода
>> Гидрообъемные трансмиссии одноковшовых экскаваторов
>> Тягово-динамический анализ гидрообъемных трансмиссий колесных одноковшовых экскаваторов III-IV размерных групп
|
Тягово-динамический анализ гидрообъемных трансмиссий
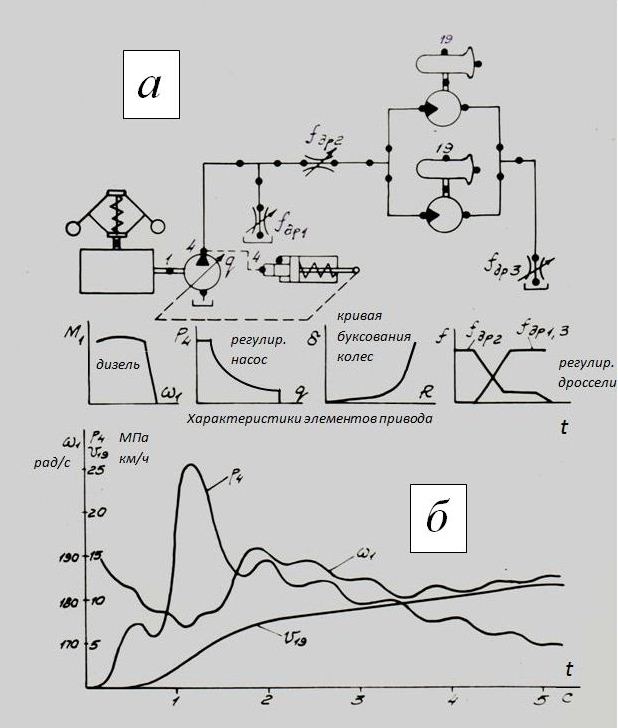
Рис. 1. Расчетная схема гидрообъемной трансмиссии колесного одноковшового экскаватора III - IV размерных групп (рис.1, а ) состоит из дизеля, регулируемого насоса с регулятором мощности, трубопроводов, тройников, гидромотор-колес и трех регулируемых дросселей. В гидрообъемной трансмиссии применена мостовая схема, поэтому работу двух гидромотор-колес каждого из мостов в расчетной схеме имитирует одно гидромотор-колесо с удвоенными механическими параметрами (момент инерции, рабочий объем гидромотора, коэффициенты механических и объемных потерь и пр.). Последнее справедливо при движении машины в плане по прямой, когда оба колеса одного и того же моста работают при одинаковом воздействии дорожного покрытия. Другой особенностью является замена гидрораспределителя с нелинейной характеристикой открытия дросселирующих окон, отличной от трапецеидальной формы, тремя регулируемыми дросселями ДР1, ДР1, ДР3. Закон изменения во времени проходных сечений этих дросселей задавался в программном модуле PERTR (одной из подпрограмм системы HYDRA), моделирующем внешние возмущения и сигналы управления. Там же заданы характеристики основных элементов привода (дизеля, регулятора мощности гидронасоса, буксования колес).Рассматриваемая схема гидропривода состоит из 21 элемента, имеет 30 узлов; порядок решаемой системы уравнений математической модели равен 50. В результате расчетов [1] , были получены зависимости, характеризующие динамические процессы разгона машины при трогании с места (рис.1, б ). Из приведенных осциллограмм видно, что при включении золотника гидрораспределителя, моделируемого дросселями ДР1, ДР1, ДР3, давление р 4 в напорной полости гидроцилиндра растет и достигает при t ≈ 1.16 с максимума, равного приблизительно 26 Мпа. В это время угловая скорость ω 1 вала дизеля падает с 190 до 175 рад/с, а скорость машины v 19 растет с 0 до 5 км/ч. Это происходит из-за того, что при разгоне машины преодолеваются как сила сопротивления качению, так и сила инерции, что возможно лишь за счет повышенного давления в напорной гидролинии. При этом увеличивается потребный момент на валу насоса, который приводит к дополнительной нагрузке дизеля, и как следствие, к уменьшению угловой скорости его вала. В дальнейшем при достижении определенной мощности происходит срабатывание регулятора мощности, который уменьшает подачу насоса. Давление р 4 при этом падает, что приводит к росту ω 1 , а также к более медленному разгону (возрастание v 19 ). При t ≥ 5 с скорость v 19 стабилизируется и составляет примерно 12 км/ч. На приведенных графиках (рис.1, б ) прослеживаются также колебания угловой скорости ω 1 и давления р 4 с частотой 1.5...2 Гц. Серия подобных расчетов позволила уточнить тягово-динамические характеристики гидрообъемных трансмиссий колесных одноковшовых экскаваторов III – IV размерных групп. |