Динамический экспресс анализ гидросистем - Библиотека математических моделей функциональных блоков
Библиотека математических моделей функциональных блоков
Приведенные здесь математические модели функциональных блоков получены, исходя из следующих допущений:
- описание гидроэлементов, имеющих высокие собственные частоты (клапаны различных типов),
производится только на уровне их статических характеристик;
- анализ режимов течения рабочей жидкости (ламинарный или турбулентный) для определения
коэффициентов гидравлического сопротивления трубопроводов не производится; потери
давления по длине учитываются по формулам квадратичного сопротивления при
фиксированных (заданных) значениях приведенных коэффициентов гидравлического
сопротивления трубопроводов;
- приведение модуля упругости полости с рабочей жидкостью с учетом упругих свойств стенок
не производится, эта величина задается в числе исходных данных для каждого функционального
блока гидросхемы.
Эти допущения определяют в основном степень упрощения математических моделей для динамического экспресс-анализа по сравнению с более точным математическим описанием гидроэлементов, приведенным выше в разделе «
Динамический анализ гидросистем
» [1 - 3].
Дизель с центробежным регулятором.
Для описания динамики дизеля с центробежным регулятором (рис. 1
а
) достаточно записать уравнение моментов на валу (узел
k
) и уравнение движения муфты регулятора (узел
l
):
 (1)
(1)
где
 приведенный момент инерции, складывающийся из собственного момента инерции вращающихся частей дизеля
приведенный момент инерции, складывающийся из собственного момента инерции вращающихся частей дизеля
 и моментов инерции насосов
и моментов инерции насосов
 ;
;
 – передаточное число согласующего редуктора между дизелем и
n
-м насосом и механический КПД
n
-го насоса;
– передаточное число согласующего редуктора между дизелем и
n
-м насосом и механический КПД
n
-го насоса;
 – характеристика дизеля (зависимость момента
– характеристика дизеля (зависимость момента
 при минимальной подаче топлива от угловой скорости
при минимальной подаче топлива от угловой скорости
 вала в узле
k
, аппроксимируемая конечным набором точек
вала в узле
k
, аппроксимируемая конечным набором точек

 – приращение крутящего момента при максимальной подаче топлива;
– приращение крутящего момента при максимальной подаче топлива;
 – постоянные настройки центробежного регулятора дизеля;
– постоянные настройки центробежного регулятора дизеля;
 – коэффициент вязкого трения;
с
,
F
– жесткость и сила предварительного сжатия пружины регулятора,
– коэффициент вязкого трения;
с
,
F
– жесткость и сила предварительного сжатия пружины регулятора,
 максимальная сила предварительного сжатия пружины и параметр ее регулирования (
максимальная сила предварительного сжатия пружины и параметр ее регулирования (
 );
);
 – текущее и максимальное перемещение муфты регулятора;
– текущее и максимальное перемещение муфты регулятора;
 – нагрузочный момент двигателя со стороны
n
-го насоса,
– нагрузочный момент двигателя со стороны
n
-го насоса,
 параметры
n
-го насоса:
параметры
n
-го насоса:
 максимальный рабочий объем насоса,
максимальный рабочий объем насоса,
 – параметр регулирования (
– параметр регулирования (
 ),
),
 давления в напорной и сливной линиях насоса.
давления в напорной и сливной линиях насоса.
Насосная установка с разомкнутой циркуляцией потока.
В соответствии с расчетной схемой (рис. 2)
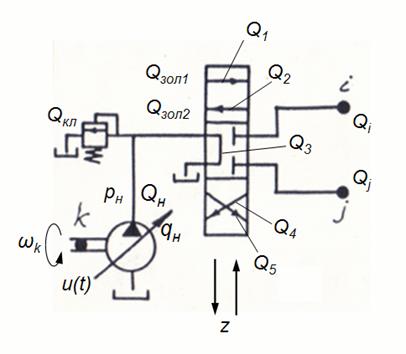
Рис. 2. Расчетная схема насосной установки с разомкнутой циркуляцией потока.
и принятыми выше допущениями математическая модель насосной установки с разомкнутой циркуляцией потока может быть записана в виде :
 (2)
(2)
где



В уравнениях (2), описывающих динамику насосной установки с разомкнутой циркуляцией потока обозначено:
 подача насоса;
подача насоса;
 максимальный рабочий объем насоса;
максимальный рабочий объем насоса;
 параметр регулирования подачи насоса
параметр регулирования подачи насоса
 ;
;
 угловая скорость вала двигателя;
угловая скорость вала двигателя;
 передаточное число согласующего редуктора между двигателем и насосом;
передаточное число согласующего редуктора между двигателем и насосом;
 коэффициент утечек (объемных потерь) насоса;
коэффициент утечек (объемных потерь) насоса;
 давление на выходе насоса;
р
* – давление срабатывания предохранительного клапана;
давление на выходе насоса;
р
* – давление срабатывания предохранительного клапана;
 расход через предохранительный клапан;
α
– угловой коэффициент статической характеристики клапана
расход через предохранительный клапан;
α
– угловой коэффициент статической характеристики клапана
 приведенный модуль упругости и объем полостей с жидкостью;
приведенный модуль упругости и объем полостей с жидкостью;
 расходы жидкости в напорной и сливной гидролиниях золотникового распределителя;
расходы жидкости в напорной и сливной гидролиниях золотникового распределителя;
 расходы жидкости в каналах распределителя;
μ
– коэффициент расхода каналов распределителя;
расходы жидкости в каналах распределителя;
μ
– коэффициент расхода каналов распределителя;
 атмосферное давление;
атмосферное давление;
 площади проходных сечений каналов распределителя в функции перемещения золотника;
ρ
– плотность рабочей жидкости;
площади проходных сечений каналов распределителя в функции перемещения золотника;
ρ
– плотность рабочей жидкости;
 давление в начале сливной линии распределителя;
давление в начале сливной линии распределителя;
 давления в магистралях за распределителем (узлы
i
и
j
) ;
давления в магистралях за распределителем (узлы
i
и
j
) ;
 приведенные коэффициенты потерь давления с учетом гидравлических сопротивлений и геометрии трубопроводов;
приведенные коэффициенты потерь давления с учетом гидравлических сопротивлений и геометрии трубопроводов;
 давление в гидробаке;
давление в гидробаке;
 расходы жидкости в узлах
i
и
j
;
В
– параметр, учитывающий инерционные эффекты дросселирующих щелей гидрораспределителя [1].
расходы жидкости в узлах
i
и
j
;
В
– параметр, учитывающий инерционные эффекты дросселирующих щелей гидрораспределителя [1].
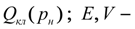
Насосная установка с замкнутой циркуляцией потока.
Согласно расчетной схеме насосной установки с замкнутой циркуляцией потока (рис. 3)
Рис. 3. Расчетная схема насосной установки с замкнутой циркуляцией потока.
и принятым выше допущениям математическая модель насосной установки этого типа имеет вид:
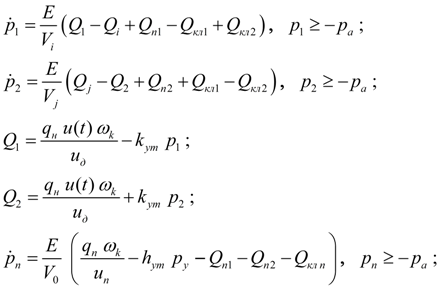
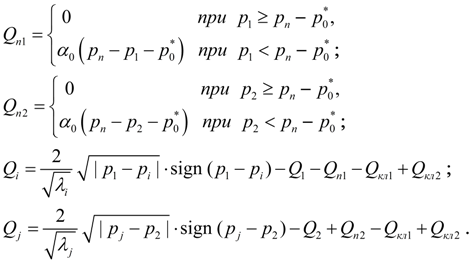
В уравнениях (3) приняты следующие обозначения:
 давления и расходы на выходе и входе основного насоса соответственно (рис. 3);
Е
– приведенный модуль упругости полостей с жидкостью;
давления и расходы на выходе и входе основного насоса соответственно (рис. 3);
Е
– приведенный модуль упругости полостей с жидкостью;
 объемы полостей;
объемы полостей;
 расходы в узлах
i
и
j
;
расходы в узлах
i
и
j
;
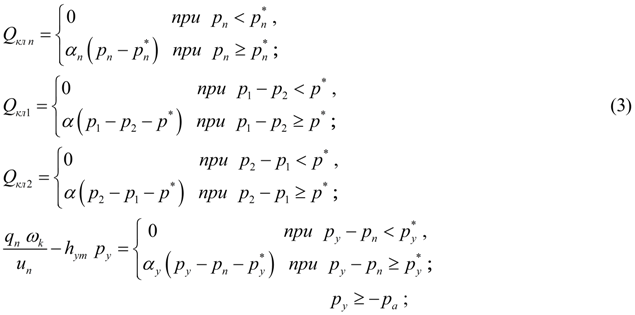
 расходы подпитки через обратные клапаны;
расходы подпитки через обратные клапаны;
 расходы через предохранительные клапаны;
расходы через предохранительные клапаны;
 максимальный рабочий объем основного насоса;
максимальный рабочий объем основного насоса;
 параметр регулирования подачи насоса
параметр регулирования подачи насоса
 ;
;
 угловая скорость вала двигателя;
угловая скорость вала двигателя;
 передаточное число согласующего редуктора между двигателем и насосом;
передаточное число согласующего редуктора между двигателем и насосом;
 коэффициенты утечек (объемных потерь) в основном насосе и насосе подпитки;
коэффициенты утечек (объемных потерь) в основном насосе и насосе подпитки;
 давление в системе подпитки перед обратными клапанами;
давление в системе подпитки перед обратными клапанами;
 объем межклапанной полости в системе подпитки;
объем межклапанной полости в системе подпитки;
 рабочий объем насоса подпитки;
рабочий объем насоса подпитки;
 передаточное число согласующего редуктора между двигателем и насосом подпитки;
передаточное число согласующего редуктора между двигателем и насосом подпитки;
 давление управления (на выходе насоса подпитки);
давление управления (на выходе насоса подпитки);
 расход через предохранительный клапан системы подпитки;
расход через предохранительный клапан системы подпитки;
 угловые коэффициенты статических характеристик предохранительных клапанов основного контура и системы подпитки;
угловые коэффициенты статических характеристик предохранительных клапанов основного контура и системы подпитки;
 давления срабатывания предохранительных клапанов основного контура и системы подпитки;
давления срабатывания предохранительных клапанов основного контура и системы подпитки;
 угловой коэффициент статической характеристики и давление срабатывания подпорного клапана;
угловой коэффициент статической характеристики и давление срабатывания подпорного клапана;
 угловой коэффициент статической характеристики и давление срабатывания обратного клапана;
угловой коэффициент статической характеристики и давление срабатывания обратного клапана;
 приведенные коэффициенты потерь давления по длине с учетом гидравлических сопротивлений и геометрии трубопроводов.
приведенные коэффициенты потерь давления по длине с учетом гидравлических сопротивлений и геометрии трубопроводов.
Гидромотор.
Динамика гидромотора с присоединенными напорным и сливным трубопроводами (расчетная схема – на рис. 4)
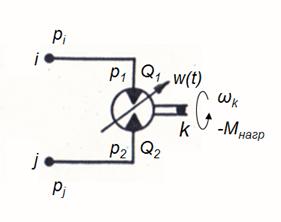
Рис. 4. Расчетная схема гидромотора.
с учетом принятых выше допущений может быть описана следующей системой дифференциально-алгебраических уравнений:
 (4)
(4)
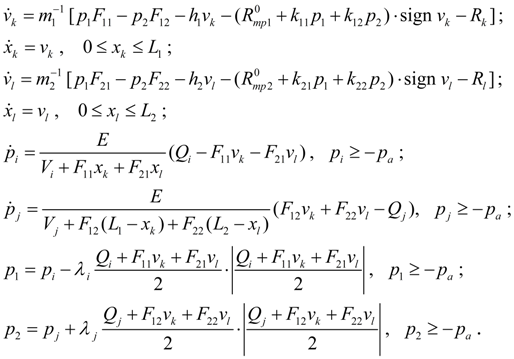
Два параллельно соединенных гидромотора.
Расчетная схема двух параллельно соединенных гидромоторов представлена на рис. 5,
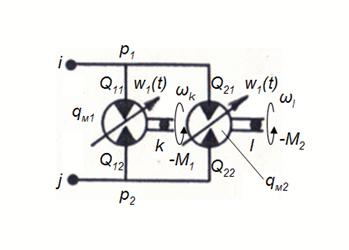
Рис. 5. Расчетная схема двух параллельно соединенных гидромоторов.
а математическая модель с учетом принятых допущений имеет вид:

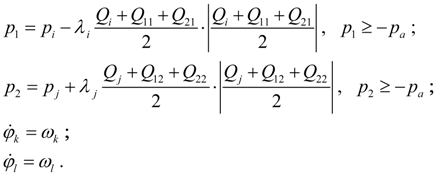
В уравнениях (4) и (5) обозначено:
 приведенные к валам гидромоторов моменты инерции вращающихся частей;
приведенные к валам гидромоторов моменты инерции вращающихся частей;
 максимальные рабочие объемы гидромоторов;
максимальные рабочие объемы гидромоторов;
 параметры регулирования рабочих объемов
параметры регулирования рабочих объемов
 ;
;
 давления на входе и выходе гидромоторов;
давления на входе и выходе гидромоторов;
 расходы на входе и выходе гидромоторов;
расходы на входе и выходе гидромоторов;
 угловые скорости и углы поворота валов гидромоторов (в узлах
k
и
l
);
угловые скорости и углы поворота валов гидромоторов (в узлах
k
и
l
);
 коэффициенты объемных потерь (утечек);
коэффициенты объемных потерь (утечек);
 давления и расходы в узлах
i
и
j
;
Е
– приведенный модуль упругости полости с жидкостью;
давления и расходы в узлах
i
и
j
;
Е
– приведенный модуль упругости полости с жидкостью;
 объемы полостей, примыкающих к узлам
i
и
j
;
объемы полостей, примыкающих к узлам
i
и
j
;
 приведенные коэффициенты потерь давления по длине с учетом гидравлических сопротивлений и геометрии трубопроводов;
приведенные коэффициенты потерь давления по длине с учетом гидравлических сопротивлений и геометрии трубопроводов;
 нагрузочные моменты, приведенные к валам гидромоторов с учетом КПД механизмов
нагрузочные моменты, приведенные к валам гидромоторов с учетом КПД механизмов

Гидроцилиндр.
Динамика гидроцилиндра с присоединенными напорной и сливной магистралями (расчетная схема – на рис. 6)
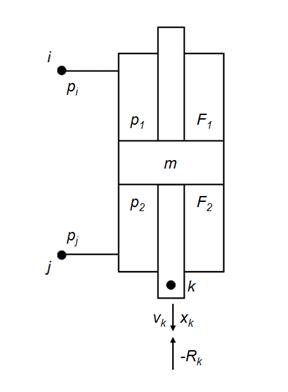
Рис. 6. Расчетная схема гидроцилиндра.
с учетом принятых допущений может быть описана следующей системой уравнений:
 (6)
(6)
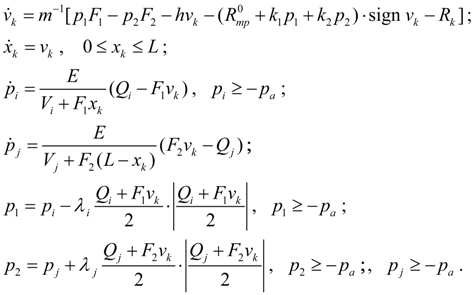
Два параллельно соединенных гидроцилиндра.
Математическая модель двух параллельно соединенных гидроцилиндров (расчетная схема представлена на рис. 7)
Рис. 7. Расчетная схема двух параллельно соединенных гидроцилиндров.
с учетом принятых допущений имеет вид:
 (7)
(7)
В уравнениях (6) – (7) приняты обозначения:
 приведеннные к штокам массы подвижных частей;
приведеннные к штокам массы подвижных частей;
 давления в полостях гидроцилиндров, примыкающих к узлам
i
и
j
;
давления в полостях гидроцилиндров, примыкающих к узлам
i
и
j
;
 рабочие площади поршней в полостях гидроцилиндров;
рабочие площади поршней в полостях гидроцилиндров;
 коэффициенты вязкого трения;
коэффициенты вязкого трения;
 скорости и перемещения штоков гидроцилиндров (узлы
k
и
l
);
скорости и перемещения штоков гидроцилиндров (узлы
k
и
l
);
 коэффициенты пропорциональности между давлениями в полостях гидроцилиндров и силами трения в уплотнениях;
коэффициенты пропорциональности между давлениями в полостях гидроцилиндров и силами трения в уплотнениях;
 значения сил трения в уплотнениях при отсутствии давления;
значения сил трения в уплотнениях при отсутствии давления;
 внешние усилия на штоках гидроцилиндров (узлы
k
и
l
);
внешние усилия на штоках гидроцилиндров (узлы
k
и
l
);
 значения максимального перемещения (хода) поршней;
значения максимального перемещения (хода) поршней;
 давления в узлах
i
и
j
трубопроводов, примыкающих к полостям гидроцилиндров;
Е
– приведенный модуль упругости полостей с жидкостью;
давления в узлах
i
и
j
трубопроводов, примыкающих к полостям гидроцилиндров;
Е
– приведенный модуль упругости полостей с жидкостью;
 минимальные объемы полостей и примыкающих к узлам
i
и
j
трубопроводов;
минимальные объемы полостей и примыкающих к узлам
i
и
j
трубопроводов;
 расходы в узлах
i
и
j
;
расходы в узлах
i
и
j
;
 приведенные коэффициенты потерь давления по длине с учетом гидравлических сопротивлений и геометрии трубопроводов.
приведенные коэффициенты потерь давления по длине с учетом гидравлических сопротивлений и геометрии трубопроводов.
Упруго-инерционная нагрузка.
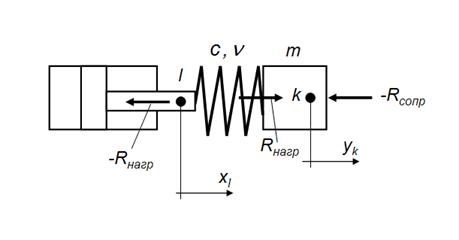
Рис. 8. Расчетная схема упруго-инерционной нагрузки при поступательном движении.
При поступательном движении
(рис. 8) упруго-инерционная нагрузка описывается уравнениями:
 (8)
(8)
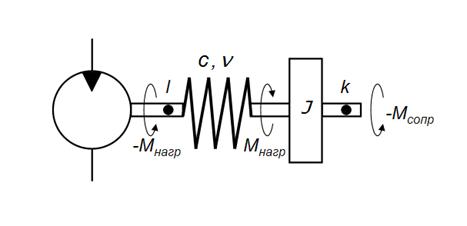
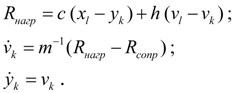
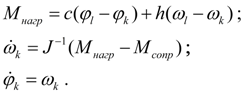
Рис. 9. Расчетная схема упруго-инерционной нагрузки при вращательномдвижении.
При вращательном движении
(рис. 9) упруго-инерционная нагрузка описывается уравнениями:
 (9)
(9)
В уравнениях (8) и (9) приняты обозначения:
 соответственно сила и момент нагрузки;
с
,
h
– жесткость и коэффициент вязкого трения;
соответственно сила и момент нагрузки;
с
,
h
– жесткость и коэффициент вязкого трения;
 соответственно сила и момент сопротивления;
т
,
J
– масса и момент инерции нагрузки;
соответственно сила и момент сопротивления;
т
,
J
– масса и момент инерции нагрузки;
 перемещение и скорость штока гидроцилиндра (узел
l
);
перемещение и скорость штока гидроцилиндра (узел
l
);
 перемещение и скорость массы (узел
k
);
перемещение и скорость массы (узел
k
);
 угол поворота и угловая скорость вала гидромотора (узел
l
);
угол поворота и угловая скорость вала гидромотора (узел
l
);
 угол поворота и угловая скорость вращающейся массы (узел
k
).
угол поворота и угловая скорость вращающейся массы (узел
k
).
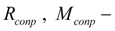
Колесный движитель (колесо).
Этот блок необходим при проведении тягово-динамических расчетов гидрообъемных трансмиссий самоходных колесных машин. Рассматриваемая здесь математическая модель колесного движителя описывает жесткую связь колеса с гидромотором (рис. 10
а
), т.е. возможные упругие деформации редуктора и вала между гидромотором и колесом не рассматриваются.
Рис. 10. Расчетная схема динамики колеса.
а
– гидромотор,
б
– кривая буксования,
в
– динамика колеса
С учетом принятых допущений математическая модель динамики колеса (колесного движителя), рис. 10
в
, имеет вид:
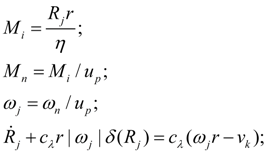 (10)
(10)
где
 – момент на колесе с учетом потерь в редукторе;
– момент на колесе с учетом потерь в редукторе;
 – момент, на валу гидромотора;
– момент, на валу гидромотора;
 – тяговая реакция (окружная сила) на колесе;
r
– динамический радиус колеса;
– тяговая реакция (окружная сила) на колесе;
r
– динамический радиус колеса;
 – КПД и передаточное число редуктора колеса;
– КПД и передаточное число редуктора колеса;
 угловые скорости вала гидромотора и колеса;
угловые скорости вала гидромотора и колеса;
 тангенциальная жесткость шины;
тангенциальная жесткость шины;
 функция буксования (рис. 10
б
).
функция буксования (рис. 10
б
).
Машина.
Динамика поступательного движения машины описывается системой уравнений:
 (11)
(11)
где
 масса, скорость, перемещение и суммарная сила сопротивления перемещению машины;
масса, скорость, перемещение и суммарная сила сопротивления перемещению машины;
 тяговая реакция (окружная сила) на
l
-ом ведущем колесе в узле
j
,
l
= 1, …,
N
;
N
– число ведущих колес (осей).
тяговая реакция (окружная сила) на
l
-ом ведущем колесе в узле
j
,
l
= 1, …,
N
;
N
– число ведущих колес (осей).
|