Введение
Динамический анализ
является важным этапом при проектировании систем разнообразных машин и механизмов (автомобилей, самоходных шасси, тракторов, строительных, дорожных, горных, сельскохозяйственных машин, станков, летательных аппаратов, стендов и т.д.) и позволяет задолго до создания опытного образца смоделировать рабочие процессы и получить необходимые данные о динамических свойствах проектируемой системы и особенностях протекания рабочих процессов, обратить внимание на наличие узких мест в системе, и до проведения испытаний осуществить оптимизацию проектного решения на базе результатов математического моделирования и вариантного анализа.
Математическое моделирование различных современных технических систем определенного класса (механических, гидравлических, электрических и др.) связано с построением моделей, обеспечивающих формализованное описание любой такой системы произвольной структуры.
Для построения формальной динамической модели системы управления используется метод, основанный на представлении системы в виде конечной
элементно-узловой структуры
. В основе такого подхода лежит идея метода конечных элементов, когда сложную по конфигурации систему можно условно разделить на отдельные функциональные
элементы
, математическое описание которых известно и для которых в рамках рассматриваемой системы можно однозначно определить условия связей этих элементов друг с другом (
вход – выход
). Тогда для описания системы в целом достаточно указать имя (
идентификатор
типа)
элемента
, пронумеровать его
узлы на входе и выходе
, задать необходимые физические, геометрические и конструктивные параметры (константы) и записать уравнения, преобразующие переменные на входе элемента в переменные на выходе. Для моделирования динамики систем управления и регулирования различной физической природы в качестве базовых элементов можно использовать
линейные
[1] и
нелинейные
[2]
динамические звенья.
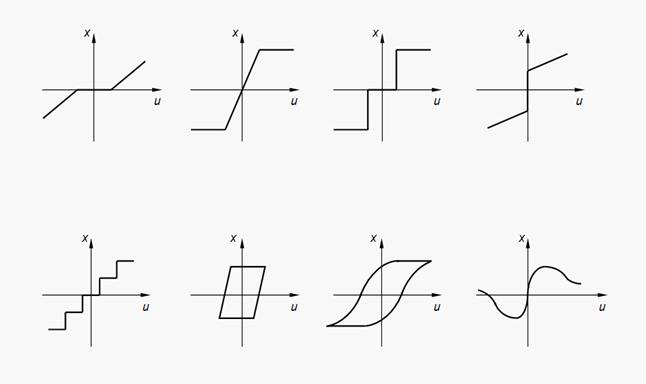
Динамические
нелинейности
связаны с нелинейными дифференциальными уравнениями динамики звена. К ним относятся нелинейное вязкое трение, расходные характеристики дросселей, клапанов и золотниковых распределителей, внешние характеристики дизельного двигателя, гидромуфты и гидротрансформатора, кривая буксования колеса и т.д. Все эти виды нелинейностей подробно рассматриваются в разделах «
Мобильные машины
», «
Гидравлические системы
», «
Приводы и трансмиссии
». В данном разделе мы ограничимся рассмотрением
линейных динамических звеньев систем автоматического регулирования
(
САР
)
.
Структура любой произвольной динамической системы может быть описана посредством идентификации элементов, нумерации узлов (точек соединения элементов в схеме по принципу
вход – выход
) и формирования на основе этого
матриц связей
, отражающих структуру (топологию) схемы. Таким образом, для моделирования динамических процессов в системах управления произвольной структуры необходимы:
– алгоритм структурного описания произвольных схем;
– библиотека математических моделей базовых элементов (динамических звеньев САР);
– систематизация исходных данных, и способ их формирования и подготовки;
– алгоритм автоматического формирования системы уравнений, описывающих систему произвольной структуры в целом;
– метод решения сформированной системы уравнений;
– программная реализация динамического расчета произвольных схем;
– способ представления и анализа полученных результатов.
Программа анализирует исходную информацию и в зависимости от состава элементов и структуры исследуемой системы выбирает из библиотеки математических моделей базовых элементов необходимые уравнения, формируя общую математическую модель системы и решая ее при заданных внешних воздействиях. |
Содержание
>> Инженерная математика
>> Системы управления
>> Динамический анализ системы управления объемным гидроприводом
>> Введение