Структурное описание произвольных систем управления
Анализ систем управления, применяемых в различных машинах, показывает, что существует конечный набор базовых элементов – динамических звеньев автоматического регулирования (САР), с помощью которых можно синтезировать практически любую систему управления.
Таблица 1. Классификация узлов линейных динамических звеньев САР
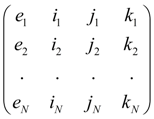
Каждый тип элемента (звено САР) получил специальное имя – идентификатор , позволяющий при формировании общей модели динамической системы выбрать в библиотеке базовых элементов и их математических моделей нужную группу уравнений, а именно: модель звена САР данного типа. Для звеньев САР выбран идентификатор ЗВЕНО. Специальная таблица 2 исходных данных для описания линейных динамических звеньев содержит числовой код, определяющий конкретный тип звена и выбор его математической модели. Как и в общем случае, в соответствии с введенной идентификацией каждый элемент e системы (в данном случае, ЗВЕНО) относится к определенному типу с соответствующими ему узлами i , j , k . Тогда структура динамической системы после нумерации всех ее узлов описывается следующей матрицей S :
S
=
где
Идентификатор
В результате такого описания структуры системы из общей библиотеки математических моделей элементов будут выбраны именно те уравнения, которыми описываются звенья, входящие в систему, а индексация переменных, входящих в уравнения (условия связей), будет установлена на основании нумерации узлов звеньев, указанных в матрице S . Таким образом, описание структуры (топологии) любой произвольной динамической системы формализуется путем: - нанесения на рабочую схему узлов – точек соединения звеньев, и нумерации узлов; - формирования структурной матрицы S на основе идентификации звеньев и нумерации их узлов. |
Содержание
>> Инженерная математика
>> Системы управления
>> Динамический анализ системы управления объемным гидроприводом
>> Структурное описание схем
 , (1)
, (1)