|
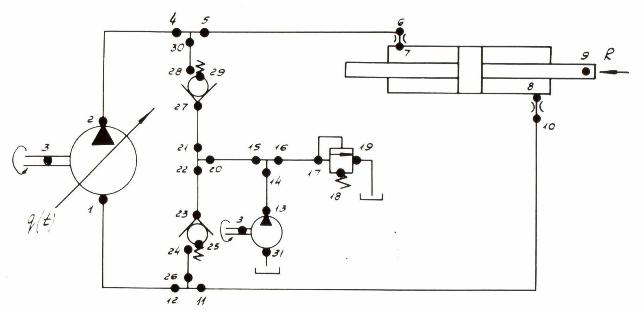
Пример Обратимся вновь к расчетной гидросхеме (рис. 2) предыдущего раздела «Алгоритм» и рассмотрим на ней изложенный выше алгоритм управления, моделируя динамику гидропривода посредством программы HYDRA.
Рис. 2 Основные параметры гидросистемы даны в табл. 1 предыдущего раздела «Пример» . В отличие от предыдущего примера, здесь взято конечное значение позиционирования поршня гидроцилиндра х Т * = 63 см. Остальные параметры гидросистемы без изменений.Спланируем закон движения
Величина потерь давления по длине трубопровода и в местных сопротивлениях принята здесь равной 1.96 МПа (половине максимального значения). Фактически эта величина при максимальном ускорении, как показали расчеты, несколько меньше (1.5...1.96 МПа), что дает некоторый запас по давлению р 1 . Итак, в период разгона (торможения) необходимо выполнение условия: Из неравенства (21) предыдущего раздела «Алгоритм» имеем: 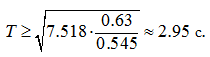
С учетом выполнения условия (32) предыдущего раздела «Алгоритм» принимаем Т = 3 с. Тогда коэффициенты полинома (1), описывающего закон движения, равны:
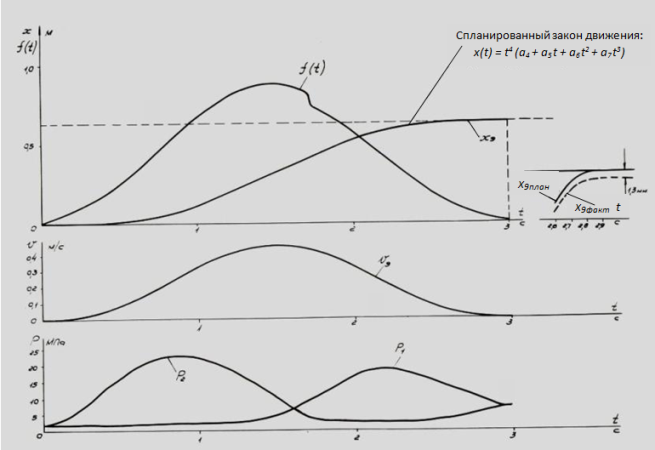
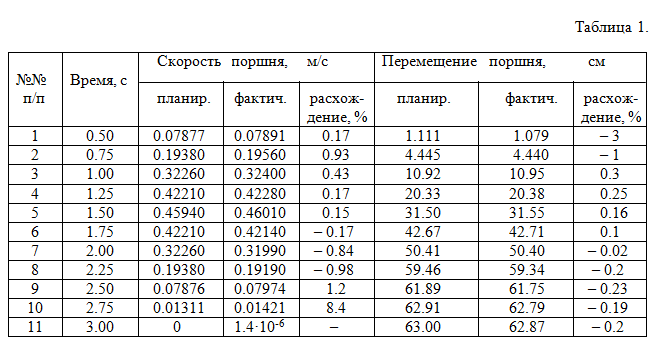
Рис. 3 Здесь, как и ранее, обозначены: р 1 , р 2 – давления на входе и выходе основного насоса (узлы 1 и 2), v 9 , х 9 – скорость и перемещение поршня гидроцилиндра (узел 9); f ( t ) – параметр регулирования подачи насоса, равныйИз приведенных на рис. 3 графиков переходных процессов видно, что в результате управления гидроприводом методом планирования закона движения пиковые давления не превышают заданного уровня ~25 МПа. Фактический и планируемый законы движения имеют незначительные отличия, показанные в табл. 1.
Причиной этих расхождений является различие в математических моделях гидропривода, принятых в программе HYDRA и в алгоритме управления (более упрощенный вариант), причем, прежде всего из-за динамики системы подпитки (например, при t ≈ 1.72 с, как видно на рис. 3, происходит скачок f ( t ) из-за резкого изменения расхода подпитки при падении давления р 2 ), а также ряда нелинейных и инерционных эффектов. Полученные максимальные расхождения по перемещению поршня составляют 1.3 мм (см. табл. 1). Нетрудно видеть, что полученные результаты подтверждают основные допущения, принятые при разработке алгоритма управления, особенно в той его части, где производится оценка максимума q ( t ). Так, максимальные значения q ( t ) и v [на рис. 3 – f ( t ) и v 9 ] почти совпадают по времени (рассогласование составляет около 0.025 с); давление в сливной магистрали р 1 почти не меняется при t ≤ 1.4...1.5 с. Достигаемая точность позиционирования того же порядка, что и при использовании метода кратных периодов собственных колебаний . Для получения более высокой точности необходимо, как уже отмечалось, введение на этапе «точного» управления специальных корректирующих звеньев с обратными связями по перемещению, скорости и, возможно, по ускорению (давлению). Однако, эти вопросы выходят за рамки данной постановки задачи. |
Содержание
>> Инженерная математика
>> Системы управления
>> Динамический синтез системы управления объемным гидроприводом
>> Синтез управления силовым гидроприводом объемного регулирования
>> Метод планирования закона движения
>> Пример