Содержание
>> Инженерная математика
>> Системы управления
>> Динамический синтез системы управления объемным гидроприводом
>> Постановка задачи
|
Постановка задачи
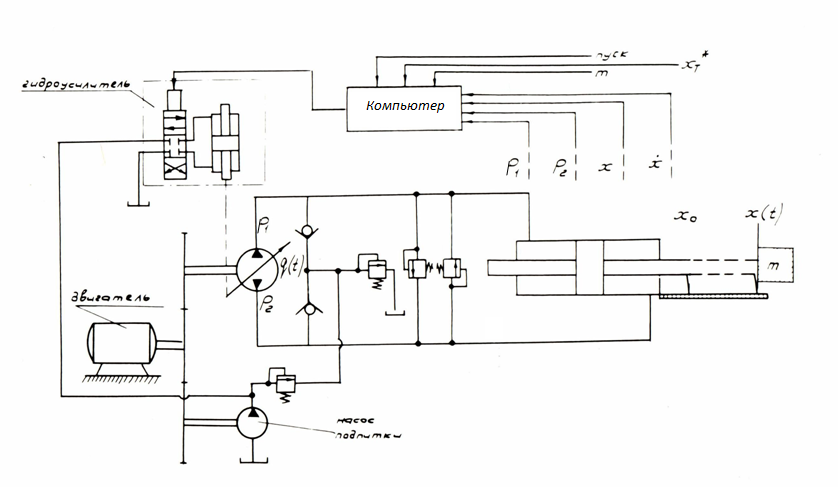
Уровень реализуемых мощностей, высокая энергоемкость, необходимость осуществлять регулирование в широком диапазоне, условия эксплуатации, налаженное серийное производство соответствующего оборудования позволяет считать, что наиболее подходящим типом силового привода для позиционирования исполнительных механизмов, например, строительных манипуляторов является объемный гидропривод с объемным или дроссельным регулированием. Основной задачей алгоритмов управления является обеспечение целенаправленного движения исполнительного механизма. В настоящее время имеются очень мощные средства, составляющие методологическую основу теории управления [1, 3 – 7]. В монографиях [3, 6, 7] представлена математическая теория оптимального управления, в основе которой лежит принцип максимума Понтрягина. В наиболее полной мере методы оптимального управления, использующие этот принцип, разработаны для линейных систем [8], для которых принцип максимума является одновременно необходимым и достаточным условием оптимальности. Для нелинейных систем (к которым относится и гидропривод) применение этого аппарата оказывается гораздо менее эффективным, поскольку класс задач, для которых синтез оптимального управления осуществим аналитически, очень узок. В большинстве случаев приходится, во-первых, устанавливать достаточные условия оптимальности для каждой конкретной задачи, а во-вторых, построение оптимальных решений возможно (в силу нелинейности) только численными методами, что сводит на нет практические преимущества данной теории. Так, в случае гидросистемы с объемным регулированием использование принципа максимума становится невозможным из-за непреодолимых аналитических трудностей, связанных как с ограничениями-нелинейностями фазовых координат гидросистемы, так и с неразрешимостью системы сопряженных дифференциальных уравнений из-за наличия в них исходных фазовых координат (как следствие нелинейности математической модели гидропривода). Применение численных методов не спасает положения, так как громадный объем вычислений, необходимых для решения задачи, приведет в реальной системе управления к невосполнимым затратам времени. В монографии [5] рассматриваются вопросы устойчивости программно управляемых движений, включая их построение, а также методы синтеза управлений, в том числе оптимальных. Подход к нахождению необходимых и достаточных условий оптимальности в различных вариационных задачах строится на основе второго метода Ляпунова. Однако изложение носит сугубо теоретизированный характер, малопригодный для практического использования в рассматриваемых задачах управления движением исполнительных механизмов. Принципиально другой подход при построении алгоритмов управления манипуляторами и роботами основан на методе планирования траектории движения исполнительного механизма [1, 4]. Обобщенные координаты исполнительных механизмов в системах управления манипуляционных роботов обычно выбираются таким образом, чтобы каждый отдельный следящий привод управлял изменением одной обобщенной координаты. Поэтому желаемые законы изменения обобщенных координат, определяемые на этапе планирования, являются одновременно управляющими сигналами этих приводов. В режиме автоматического планирования на компьютере эти задачи должны решаться с помощью специальных алгоритмов, возможные варианты которых рассматриваются в монографии [1]. В данном разделе рассмотрены некоторые алгоритмы управления применительно к системам силового гидропривода. Для их реализации необходима система управления, которая с одной стороны в состоянии обработать большой объем входной информации о параметрах машины, а с другой – на основе этой обработки с помощью специального алгоритма выбрать оптимальное (по тому или иному критерию) управление. Решение такого рода задачи должно осуществляться за возможно минимальное время. Таким образом, постановка задачи может быть сформулирована следующим образом. Объектом исследований являются системы силового гидропривода объемного и дроссельного регулирования применительно к строительным манипуляторам и роботизированным машинам и устройствам. При производстве строительных и монтажных работ в соответствии с существующими нормативами необходима высокая точность позиционирования грузов большой массы. Кроме того, по технологии работ в строительстве при перемещении грузов требуется реализация достаточно сложных траекторий с совмещением рабочих операций строительных машин и механизмов. Задача построения алгоритма управления движением по некоторой степени подвижности механизма в общем случае может быть сформулирована следующим образом: – обеспечить перемещение груза (переменной массы) из начального положения x 0 в конечное положение x T * за минимально возможное время с максимальной точностью при соблюдении ряда ограничений (по скорости, ускорению, давлению). Представляется, что наиболее целесообразным решением поставленной задачи будет сочетание двух этапов управления: 1) управление разомкнутой системой по заданному закону движения [1] со слежением за текущим значением управляемой координаты – так называемое «грубое» управление . При этом заданная точность позиционирования может не достигаться, но должно обеспечиваться максимально возможное быстродействие; 2) управление замкнутой системой с подключением соответствующих корректирующих звеньев по положению, скорости, ускорению при достижении текущей координатой значения, близкого к целевому – так называемое «точное» управление . При этом выбор обратных связей должен обеспечивать не только заданную точность позиционирования, но и апериодичность процесса в зоне регулирования и необходимый запас устойчивости. Таким образом, при позиционировании исполнительных механизмов возникает задача построения алгоритма управления движением следящего привода с обратными связями по фазовым координатам (для гидропривода поступательного движения – по перемещению x ( t ) и скорости v ( t ) поршня гидроцилиндра, для гидропривода вращательного движения – по углу поворота φ ( t ) и угловой скорости ω ( t ) вала (гидромотора, редуктора, поворотной платформы), а также – давлениям p 1 ( t ) и p 2 ( t ) в напорной и сливной полостях гидродвигателя). На рис. 1 представлена принципиальная схема силового гидропривода объемного регулирования с замкнутой циркуляцией потока.
Рис. 1. Фазовые координатыОбеспечить управление q ( t ) приводом подачи груза массой m из точки x 0 в точку x T * за минимальное время Т при ограничениях: 
где x T , x T * – соответственно фактическое и заданное конечное положение груза; 3) | q ( t ) | ≤ q н , (3) где q н – максимальный рабочий объем насоса.
Рис. 2. Для схемы силового гидропривода с дроссельным регулированием (рис. 2) аналогичная задача построения алгоритма управления приводом подачи может быть сформулирована следующим образом.Обеспечить управление где |