Содержание
>> Анализ и проектирование
>> Системы объемного гидропривода
>> Гидроприводы строительных самоходных кранов
>> Динамика гидроприводов главной лебедки и механизма подъема-опускания стрелы строительных самоходных кранов грузоподъемностью 25 и 100 тс
|
Динамика гидроприводов главной лебедки и механизма подъема-опускания
В условиях большого количества моделей кранов и широкого спектра нагрузок решение такой задачи существенно облегчается применением программных средств автоматизированного расчета. В частности, с помощью программного комплекса HYDRA были проведены исследования динамики гидросистем лебедки основного подъема и механизма наклона стрелы кранов грузоподъемностью 25 и 100 т. Указанные механизмы в режимах опускания грузов, стрелы при неправильной настройке тормозного и предохранительного клапанов подвержены автоколебаниям. Поэтому целью проведенных исследований являлось определение значений ряда параметров, обеспечивающих плавную работу механизмов в указанных режимах, а также оценка их влияния на устойчивость работы, характер переходных процессов в гидроприводе, пиковые давления.
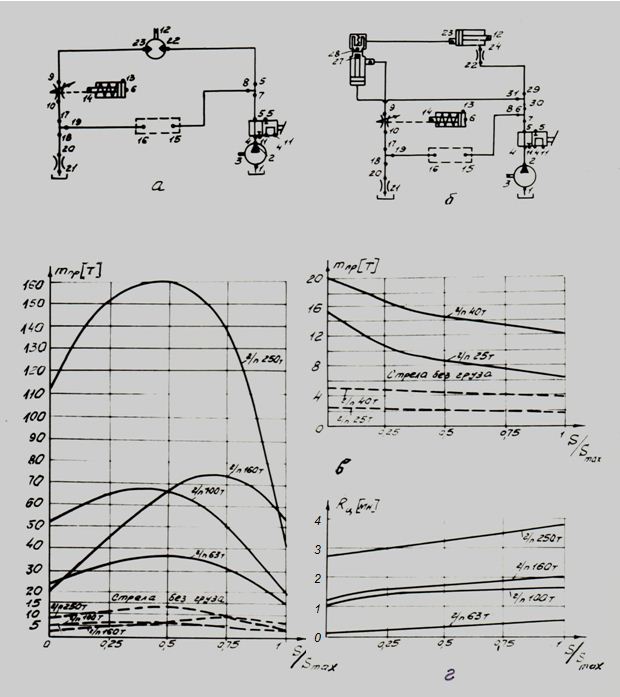
Рис. 1. На рис.1, а, б приведены расчетные схемы гидросистем кранов: гидропривода грузовой лебедки ( а ) и гидропривода механизма наклона стрелы ( б ) с нанесенными на них узлами 1, ..., 31. Каждый типовой гидроэлемент (насос, гидромотор, клапан и т.д.) описывается определенной математической моделью , отражающей его основные динамические свойства. Для предохранительного клапана прямого действия, соединяющего узлы 15 и 16, в рамках рассматриваемой задачи была использована упрощенная математическая модель, описывающая только статическую характеристику. Тормозной клапан представлен на расчетной схеме в виде комбинации подпружиненного поршня регулятора и регулируемого дросселя, проходное сечение которого является функцией перемещения поршня.В качестве основных возмущающих воздействий были приняты: силы, моменты, приведенные массы, перемещение золотника гидрораспределителя. Момент на валу барабана лебедки с учетом динамической нагрузки [3]:
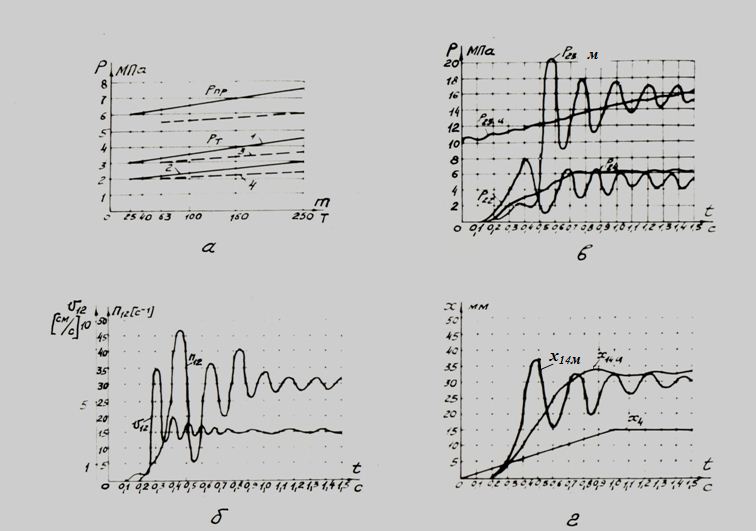
D б – диаметр барабана; m г – масса груза; К п – кратность полиспаста; η п – КПД полиспаста; ω – частота собственных колебаний механической системы крана и груза; n гм – частота вращения вала гидромотора; u л – передаточное число редуктора лебедки; g – ускорение свободного падения. Зависимости массы m пр стрелы с грузом и силы R ц , приведенных к штоку гидроцилиндра механизма подъема-опускания стрелы, от относительного хода поршня S/S max , где S max – максимальный ход поршня, представлены на рис. 1, в , г . Перемещение золотника гидрораспределителя из одной позиции в другую осуществлялось по линейному закону за 1 с. В процессе моделирования гидросистем проверялась устойчивость режимов опускания крановых механизмов при различных давлениях настройки р т тормозного клапана (давление начала открытия запорно-регулируемого золотника), которое изменялось от 2 до 5 Мпа. Динамический анализ гидросистем грузовой лебедки и механизма наклона стрелы, например, крана грузоподъемностью 100 т, проводился при следующих значениях основных параметров: рабочие объемы насоса и двух гидромоторов 225 см 3 /об; диаметры поршня и штока гидроцилиндра 300 мм и 200 мм, ход поршня 2980 мм; диаметр и длина напорной и сливной гидролиний соответственно 32 мм и 2 м; давление настройки предохранительного клапана р пр = 17.5 Мпа; угловая скорость вала насоса 100 рад/с; объемный модуль упругости рабочей жидкости 1000 Мпа; максимальная площадь проходного сечения регулируемого дросселя 9-10 равна 2.4 см 2 ; диаметр условного прохода и ход золотника гидрораспределителя соответственно 32 мм и 24 мм. В кранах бóльших грузоподъемностей увеличение количества гидродвигателей учитывалось соответствующим изменением параметров гидроцилиндра или гидромотора. Анализ полученных результатов показал, что наиболее чувствительным к изменению параметров настройки является механизм грузоподъемной лебедки. Колебания при переходных процессах в гидросистемах лебедок у кранов всех рассматриваемых грузоподъемностей начинаются при значениях р т в 1.5 раза бóльших, чем в гидросистемах подъема-опускания стрелы. На рис. 2, а показаны зависимости [2], c помощью которых рекомендуется выбирать давления настройки предохранительного и тормозного клапана для механизмов лебедки и подъема-опускания стрелы.
Рис. 2. На рис. 2, б, в, г приведены типовые расчетные осциллограммы переходных процессов в гидросистемах механизмов грузовой лебедки и подъема-опускания стрелы крана грузоподъемностью 100 т в режиме опускания при р т = 3.5 Мпа.Как видно из рис. 2, б , стабилизация скорости v 12 опускания стрелы происходит быстрее (0.7 с), чем стабилизация частоты вращения n 12 вала гидромотора (1.1 с), которая имеет при этом относительно бóльшую амплитуду и меньшую частоту колебаний. Колебания давлений (рис. 2, в ) в подводящей и отводящей магистралях гидромотора р 22 , р 23 м и гидроцилиндра р 24 , р 23 ц имеют одинаковую частоту, но отличаются по амплитуде и фазе. Затухание колебаний этих величин до установившихся значений амплитуды в механизме лебедки происходит через 1.1 с после начала переключения золотника. Колебания давлений в гидроцилиндре происходят с небольшой амплитудой и низкой частотой, что свидетельствует о меньшей подверженности гидросистемы механизма подъема-опускания стрелы автоколебаниям. Динамика перемещений х 14 м и х 14 ц золотника тормозного клапана при работе в гидросистеме лебедки и механизма наклона стрелы, а также закон перемещения х золотника гидрораспределителя показаны на рис. 2, г . Анализ осциллограмм показал, что гидросистемы обладают достаточной степенью демпфирования элементов для гашения собственных колебаний. Было установлено, что давление настройки предохранительного клапана р пр , ограничивающего давление, развиваемое насосом в процессе опускания груза и стрелы, не оказывает влияния на устойчивость этих процессов. Однако, для предотвращения неоправданных потерь энергии основным условием для выбора величины р пр должно быть обеспечение номинальной скорости опускания. Расчетами было установлено, что опускание механизмов начинается только при соблюдении условия р пр / р т > 1, так как только при этом начинается открытие тормозного клапана. Достижение номинальной скорости опускания при полностью открытом канале гидрораспределителя возможно лишь при выполнении условия р пр / р т ≥ 1.2. С учетом статической характеристики предохранительного клапана был принят запас по давлению для обеспечения его стабильной работы совместно с тормозным клапаном. Полученные расчетные результаты были экспериментально проверены на стендах, а также на кранах грузоподъемностью 25 и 40 т [3]. Переходные процессы, полученные опытным путем, носят тот же характер, что и расчетные, а их параметры отличаются не более чем на 5-8%, что свидетельствует о достаточной корректности проведенного численного анализа. На основе проведенных исследований были откорректированы принципиальные схемы гидросистем кранов, обоснован и снижен уровень давления настройки предохранительных и тормозных клапанов, улучшены динамические характеристики гидросистем. |