Содержание
>> Инженерная математика
>> Системы управления
>> Динамический синтез системы управления объемным гидроприводом
>> Синтез управления силовым гидроприводом дроссельного регулирования
>> Об управлении силовым гидроприводом дроссельного регулирования
|
Системы управления - Динамический сиснтез - Об управлении силовым гидроприводом дроссельного регулирования
Об управлении силовым гидроприводом дроссельного регулирования
В качестве силового следящего привода, например, для строительных робототехнических систем, может использоваться гидропривод с
дроссельным регулированием (рис. 1), поэтому задача построения алгоритма управления приводом такого типа сводится к синтезу
дроссельного управляющего устройства, обеспечивающего требуемый закон движения поршня исполнительного гидроцилиндра. Решение этой
задачи методом планирования закона движения без ограничения общности может быть сведено к задаче управления дроссельным гидроприводом
на этапе торможения поршня гидроцилиндра, рассмотренной выше в разделе "Динамический синтез гидравлических устройств".
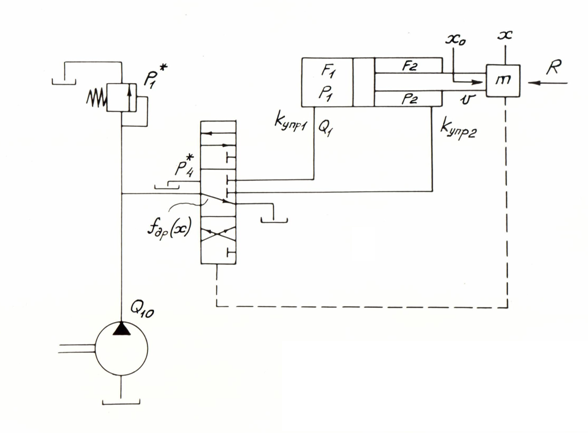
Рис. 1.
Точность позиционирования в этом случае, как показали расчеты, обеспечивается в требуемых пределах (наблюдаемое расхождение по
перемещению поршня << 0.5 мм). Тем не менее, следует отметить, что при планировании закона движения многочленом придется
задавать дополнительно граничное условие равенства нулю третьей производной
 в конце торможения при
t
=
T
, чтобы избежать возможных последствий (при
t
>
T
), вызванных
изменением давлений. Это приведет к увеличению степени аппроксимирующего полинома до шестой. В реальной системе помимо этого,
по-видимому, потребуется наличие специальных устройств типа гидрозамков, обеспечивающих фиксацию поршня гидроцилиндра исполнительного
механизма. Ввиду «плавания» и неучета некоторых параметров гидросистемы необходимо обеспечить также ее повышенные демпфирующие свойства.
в конце торможения при
t
=
T
, чтобы избежать возможных последствий (при
t
>
T
), вызванных
изменением давлений. Это приведет к увеличению степени аппроксимирующего полинома до шестой. В реальной системе помимо этого,
по-видимому, потребуется наличие специальных устройств типа гидрозамков, обеспечивающих фиксацию поршня гидроцилиндра исполнительного
механизма. Ввиду «плавания» и неучета некоторых параметров гидросистемы необходимо обеспечить также ее повышенные демпфирующие свойства.
В остальном алгоритм управления для гидропривода дроссельного типа практически идентичен изложенному выше при решении задачи
динамического синтеза дроссельных тормозных устройств гидроцилиндров в разделе "Динамический синтез гидравлических устройств".
|