ПримерыНиже приведен ряд примеров для иллюстрации возможностей разработанного алгоритма моделирования динамики гидросистем. Во всех примерах проводится анализ переходных процессов в выбранных схемах гидропривода, которые можно скорректировать путем выбора отдельных параметров гидроэлементов или изменения исходной схемы. 1. Гидросистемы «насос-гидродвигатель» Рассмотрим наиболее часто встречающуюся гидросхему, включающую насос с постоянной подачей, гидродвигатель (цилиндр или мотор), необходимые соединительные трубопроводы и предохранительный клапан. При всей традиционности представленной гидросхемы число вариантов всевозможных сочетаний параметров так велико, что на практике приходится проводить динамический анализ для каждого конкретного случая. На рис. 6 представлен ряд характерных примеров таких гидросхем.
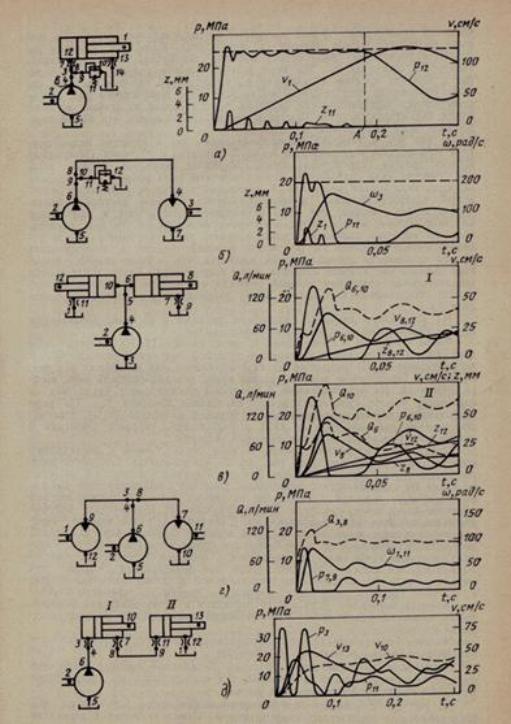
Схема, показанная на рис. 6 а , состоит из 9 элементов, соединенных в 14 узлах. Ее структура, описанная с помощью матрицы связей (41), имеет вид: НАСОС 1 5 6 2 ТРУБА 1 6 4 0 ТРУБА 2 8 9 0 ТРУБА 3 3 7 0 ТРОЙНИК 1 4 3 8 ДРОССЕЛЬ 1 7 12 0 ДРОССЕЛЬ 2 13 14 0 ЦИЛИНДР 1 12 13 1 КЛАПАН 1 9 10 11
Для гидросистемы приняты следующие начальные условия: скорость и перемещение поршня гидроцилиндра равны нулю, угловая скорость вала насоса постоянна, вся подача от насоса поступает в гидролинию 6 – 4. Математическая модель привода – система дифференциально-алгебраических уравнений 24-го порядка. Решением системы уравнений являются значения давлений, расходов жидкости, скоростей и перемещений во всех узлах гидросистемы в функции времени. На рис. 6
а
показано, что в начальный момент имеет место «заброс» давления
р
12
в поршневой полости гидроцилиндра, которое превышает давление настройки предохранительного клапана, после чего начинаются незначительные колебания давления относительно уровня настройки предохранительного клапана. При этом происходит разгон поршня гидроцилиндра (скорость поршня
v
1
возрастает). Колебания давления
р
12
являются следствием срабатывания клапана и колебаний затвора
z
11
.
По мере разгона поршня, начиная с момента времени
А
, давление
р
12
в поршневой полости цилиндра начинает падать, но поршень еще движется по инерции. При этом клапан уже полностью закрыт. Колебательность давления
р
12
и скорости
v
1
зависит от сочетания параметров системы. Время переходного процесса составило около 0.3 с.
2. Система «дизель – насос – нагрузка» В рассмотренных выше примерах угловая скорость вала насоса принималась постоянной. В реальных гидросистемах, где в качестве первичного двигателя часто используется двигатель внутреннего сгорания, с возрастанием нагрузки (давления в гидросистеме) угловая скорость вала двигателя (а зачит, и насоса) уменьшается. Если в рассмотренных выше примерах учесть и этот фактор, то характер переходных процессов может значительно усложниться.
в – то же при различных значениях коэффициента вязкого трения центробежного регулятора
Рассмотрим следующий пример (рис. 7). Дизель с центробежным регулятором приводит во вращение нерегулируемый насос, на выходе которого установлен дроссель, имитирующий нагрузку в гидросистеме. Структура схемы (рис. 7 а ) описывается следующей матрицей связей:
ДИЗЕЛЬ 1 0 2 1 НАСОС 1 5 6 0 ТРУБА 1 6 4 0 ДРОССЕЛЬ 1 4 3 0
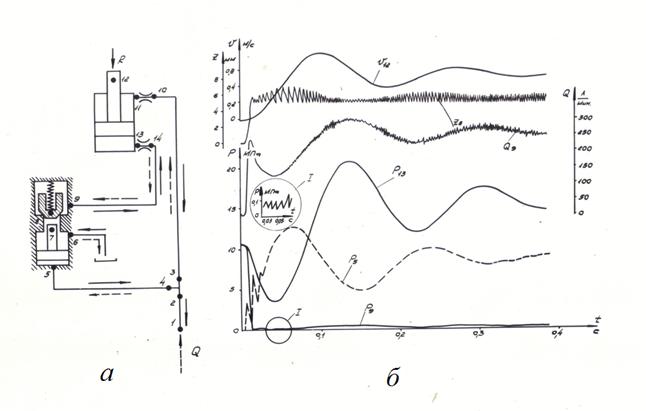
3. Динамика гидрозамка при опускании поршня гидроцилиндра
а – расчетная схема, б – переходные процессы
Основные параметры гидросистемы:
гидроцилиндр:
диаметр поршня 100 мм, диаметр штока 50 мм, ход поршня 1000 мм, приведенная к штоку масса 8000 кг, приведенный к штоку вес рабочего оборудования ~ 80 000 Н;
трубопроводы:
диаметр трубопроводов 20 мм, длина трубопроводов: (2-1) - 2м, (10-3) - 2м, (5-4) - 1м, (9-14) - 1м;
гидрозамок:
масса толкателя 0.3 кг, масса клапана 0.1 кг, рабочая площадь толкателя 15.9 см², рабочая площадь клапана 5.3 см², ход толкателя 11 мм, начальный зазор между толкателем и клапаном 6 мм, коэффициент вязкого трения клапана 300 Н·с/м, жесткость пружины клапана 5200 Н/м, диаметр седла клапана 26 мм, угол конусности клапана 70º, коэффициент расхода клапана 0.62;
дроссель
(13-14):
диаметр условного прохода 7 мм, коэффициент расхода 0.62;
рабочая жидкость:
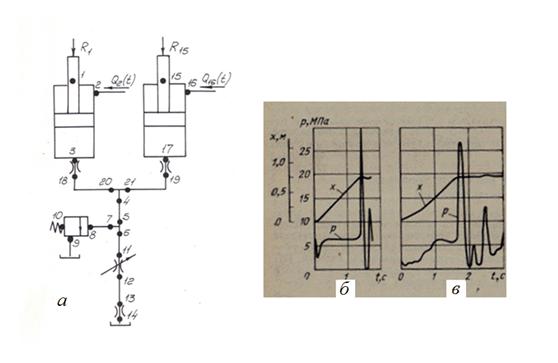
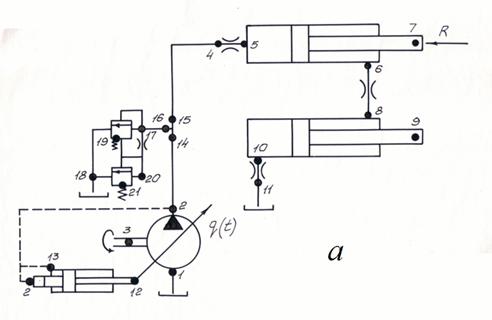
плотность 900 кг/м³, кинематическая вязкость 3·10 -5 м²/с, объемный модуль упругости 5·10 8 Н/м². На рис. 8 б представлены переходные процессы в рассматриваемой гидросистеме в режиме опускания поршня гидроцилиндра. В начальный момент система находится в равновесии, причем усилие на штоке 80 000 Н уравновешивается статическим давлением в поршневой полости ~ 10.4 МПа. При подаче в гидросистему расхода жидкости 200 л/мин начинает возрастать давление в штоковой полости гидроцилиндра и одновременно под поршнем толкателя р 5 . При t ≈ 0.006 с, когда р 5 достигает значения ~ 3.5 МПа, при этом р 5 ≈ 0.33 р 9 , открывается клапан гидрозамка ( z 8 изменяется от 0 до 5 мм), давление жидкости в надклапанной полости р 9 падает, а давление в штоковой полости в силу инерции приведенной массы гидроцилиндра продолжает расти (скорость v 12 в этот период времени мала). В результате наблюдается скачок давления р 5 до 12.6 МПа и падение давления р 13 до 3.5 МПа. По мере разгона поршня гидроцилиндра давление р 5 снижается, а р 13 возрастает, в системе возникают затухающие колебания давлений р 5 и р 13 и скорости v 12 поршня гидроцилиндра с частотой около 6 Гц. В то же время имеют место высокочастотные колебания клапана гидрозамка с частотой 250...500 Гц и амплитудой 0.5...2 мм, обусловленные отскоками клапана от толкателя, достигшего своего упора, и последующими их соударениями. Однако сколько-нибудь заметного влияния на выходные параметры гидросистемы (давление р 13 в поршневой полости гидроцилиндра, скорость v 12 перемещения поршня) динамика гидрозамка не оказывает. Тем не менее следует подчеркнуть, что для достижения устойчивого режима работы гидрозамка и гидросистемы в целом необходимо правильно выбрать проходное сечение дросселирующего элемента 13-14. В противном случае, как показал анализ той же схемы, система становится неустойчивой. Например, при диаметре дросселя 13-14, равном 20 мм, в системе возникает значительная динамика, сопровождающаяся гидравлическими ударами. Поэтому для осуществления плавного режима опускания поршня в широком диапазоне нагрузок в гидросистемах наряду с гидрозамком обычно устанавливают тормозной клапан, обеспечивающий регулирование скорости опускания рабочих органов в функции нагрузки. 4. Гидропривод опускания стрелы гидравлического экскаватора При опускании стрелы гидравлического экакаватора с резким торможением («подхватыванием») в гидросистеме возникают высокие пиковые давления, являющиеся следствием гидравлического удара. Для правильного выбора предохранительного клапана необходимо проведение динамического расчета гидросистемы [9]. Рассмотрим схему гидропривода опускания стрелы экскаватора, приведенную на рис. 9 а . Схема содержит 15 элементов и 21 узел и описывается системой нелинейных алгебраических и дифференциальных уравнений 38-го порядка.
а – расчетная схема, б – результаты расчета, в – экспериментальные данные
При разгоне поршней гидроцилиндров в начале опускания значения Q 2 и Q 16 нарастают от нуля до установившегося значения, соответствующего расходу насоса, а при торможении подача жидкости в гидроцилиндры прекращается. Таким образом, f др 11-12 - площадь проходного сечения дросселя (11-12) и расходы рабочей жидкости Q 2 и Q 16 определяются зависимостью:
Здесь через f обозначены: f др 11-12 , или Q 2 , или Q 16 , а через f max – соответственно, максимальная площадь ( f др 11-12 ) max проходного сечения дросселя (11-12) или Q н / 2, где Q н = 350 л/мин – производительность насоса; τ – время регулирования (принято τ = 0.1 с); l – положение поршня гидроцилиндра в момент начала торможения (принято l = 700 мм); z 1 – текущее положение поршня гидроцилиндра; t 0 – момент начала торможения.
Основные параметры гидросистемы:
гидроцилиндры:
диаметр поршня 125 мм, диаметр штока 80 мм, ход поршня 1000 мм, приведенная к штоку масса 17 660 кг, приведенный к штоку вес рабочего оборудования ~ 76 500 Н,
трубопроводы:
диаметр трубопроводов 25 мм, длина трубопроводов: (4-5) - 0.8 м, (6-11) - 0.2 м, (7-8) - 0.2 м, (12-13) - 2.5 м, (18-20) - 2.8 м, (19-21) - 2.8 м,
предохранительный клапан
(4 варианта):
вариант 1 2 3 4
масса подвижной части, кг 0.142 0.108 0.142 0.074 жесткость пружины, Н/м, 9.8·10 4 10.6·10 4 9.8·10 4 9.8·10 4 рабочая площадь со стороны напора, см² 1.77 1.33 1.77 1.77 рабочая площадь со стороны слива, см² 8.05 6.15 8.05 8.05 средний диаметр дросселирующей щели, мм 15 13 15 15 угол конусности 60º, коэффициент расхода 0.62;
тройники:
диаметры в узлах тройников: 25 мм, коэффициенты местного сопротивления ветвей тройников: (5-6-7) - 0.2, 1.0, 1.0; (20-21-4) - 2.5, 2.5, 2.5;
дроссели:
площадь проходного сечения дросселей: (3-18) - 4.9 см², (11-12) - 4.9 см² (максимальная), (13-14) - 2.44 см², (17-19) - 4.9 см²,
коэффициент расхода дросселей 0.62;
рабочая жидкость:
плотность 900 кг/м³, кинематическая вязкость 2·10
-5
м²/с, объемный модуль упругости
(2 варианта)
4.9·10
8
Н/м² и 9.8·10
8
Н/м².
На рис. 9 б , в представлены для сравнения расчетные и экспериментальные зависимости переходных процессов в гидросистеме экскаватора при опускании стрелы с «подхватыванием» (резким торможением) при давлении настройки предохранительного клапана 30 МПа. Расчетное значение пикового давления в поршневой полости гидроцилиндра подъема-опускания стрелы составило ~ 28.6 МПа и отличается от значения 26 МПа, полученного в эксперименте, на 10%. В целом, как видно из осциллограмм, характер расчетных зависимостей давления р и перемещения х штока гидроцилиндра (рис. 9 б ), близок к полученным экспериментальным путем (рис. 9 в ). Продолжительность переходных процессов 0.1...0.15 с. 5. Главный гидропривод автобетононасоса
Основные параметры гидросистемы:
насос:
207.32
регулятор мощности:
400.32
мощность ~51.5 кВт, давление срабатывания ~13 МПа,
гидроцилиндры:
диаметр поршня 100 мм, диаметр штока 63 мм, ход поршня 1400 мм,
предохранительный клапан:
510.32 (непрямого действия)
давление настройки ~20.6 МПа,
трубопроводы:
стальной трубопровод (2-14): диаметр 40 мм, длина 1.2 м, рукав высокого давления (15-4): диаметр 32 мм, длина 1.65 м, стальной трубопровод (16-17): диаметр 20 мм, длина 1.0 м,
дроссели
:
(4-5): площадь проходного сечения 12.56 см², коэффициент расхода 0.62,
(10-11): площади проходного сечения 12.56 см², коэффициент расхода 0.62,
(6-8): площадь проходного сечения 8.04 см², коэффициент расхода 0.62,
тройник
(14-15-16):
диаметры в узлах тройника: 40 мм, 32 мм, 20 мм, коэффициенты местного сопротивления ветвей тройников: 2.5, 2.5, 2.5;
рабочая жидкость:
плотность 900 кг/м³, кинематическая вязкость 3·10 -5 м²/с, объемный модуль упругости 9.8·10 8 Н/м².
Нагрузка от столба бетонной смеси, действующая на поршни бетонорастворных цилиндров, жестко связанные общими штоками с поршнями гидроцилиндров, задавалась двумя составляющими: переменной силой в функции перемещения
z
7
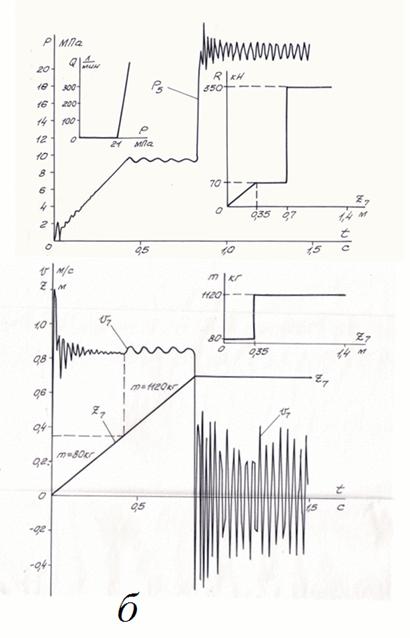
поршня гидроцилиндра, имитирующей процесс сжатия смеси ввиду неполного заполнения бетонорастворных цилиндров, и процесс ее перемещения с определенным сопротивлением (график этой зависимости
R
(
z
7
) представлен на рис. 10
б
), и переменной массой
m
(
z
7
), приведенной к штоку гидроцилиндра (рис. 10
б
), равной сумме масс поршня со штоком гидроцилиндра и поршня бетонорастворного цилиндра на начальном отрезке перемещения (
z
7
≤ 0.35 м, рис. 10
б
) и претерпевающей скачок при
z
7
= 0.35 м ввиду добавления массы столба бетонной смеси. Ясно, что такая модель нагрузки не учитывает возможных колебаний давления в бетонной смеси. Однако, учет этой составляющей является предметом специальных исследований и станет возможным лишь после проведения соответствующих экспериментов с целью изучения характера волновых и колебательных процессов в бетонопроводе.
Для моделирования аварийных режимов стопорения штока гидроцилиндра ввиду резкого возрастания нагрузки (с целью изучения динамики гидросистемы при срабатывании предохранительного клапана) был дополнительно рассмотрен случай скачка нагрузки при z 7 > 0.7 м (см. график R ( z 7 ) на рис. 10 б ) до уровня максимальной. В результате динамического расчета были получены переходные процессы по давлению р 5 в поршневой полости гидроцилиндра (5-6-7), скорости v 7 и перемещению z 7 штока этого гидроцилиндра и другим фазовым переменным гидросистемы в функции времени t . Характерным является достаточно плавное изменение давления р 5 , несмотря на скачок приведенной массы, который повлиял лишь на собственную частоту колебаний, изменившейся с 30 Гц до 11.4 Гц. Режим максимальных нагрузок был рассмотрен как при отключенном регуляторе мощности, так и при подключении последнего в схему. При резком возрастании нагрузки R с 68.6 кН до 343 кН, а следовательно, и давления р 5 , наряду с предохранительным клапаном срабатывает и регулятор мощности, уменьшая рабочий объем насоса на ~39% от максимального. Однако, как показал анализ, существенного влияния на динамику привода это не оказало. Наличие регулятора мощности сказалось лишь на снижении среднего значения давления р 5 примерно на 0.7 МПа. |