Примеры
Пример 1.
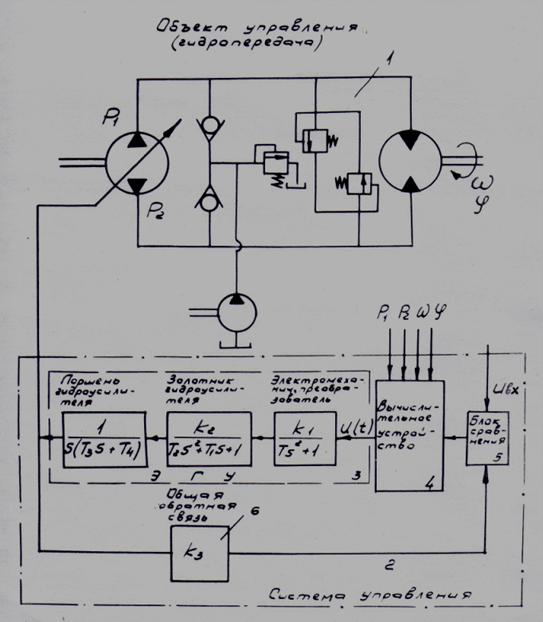
Система управления гидроприводом на базе типовых линейных звеньев САР.
Объект управления – гидропередача
1
с замкнутым контуром циркуляции рабочей жидкости. Система управления
2
состоит из электрогидравлического усилителя (ЭГУ)
3
, вычислительного устройства
4
, блока сравнения
5
и общей обратной связи
6
. Электрогидравлический усилитель
3
представлен в виде последовательного соединения типовых линейных динамических звеньев: консервативного звена
7
(электромеханического преобразователя), апериодического звена 2-го порядка
8
(золотника гидроусилителя) и инерциального интегрирующего звена
9
(поршня гидроусилителя). В обратной связи
6
находится усилительное звено. Блок сравнения
5
является сумматором. Конкретная реализация вычислительного устройства
4
зависит от алгоритма выполняемых им преобразований.
На рис. 2 обозначены:
Пример 2.
Моделирование системы управления гидроприводом.
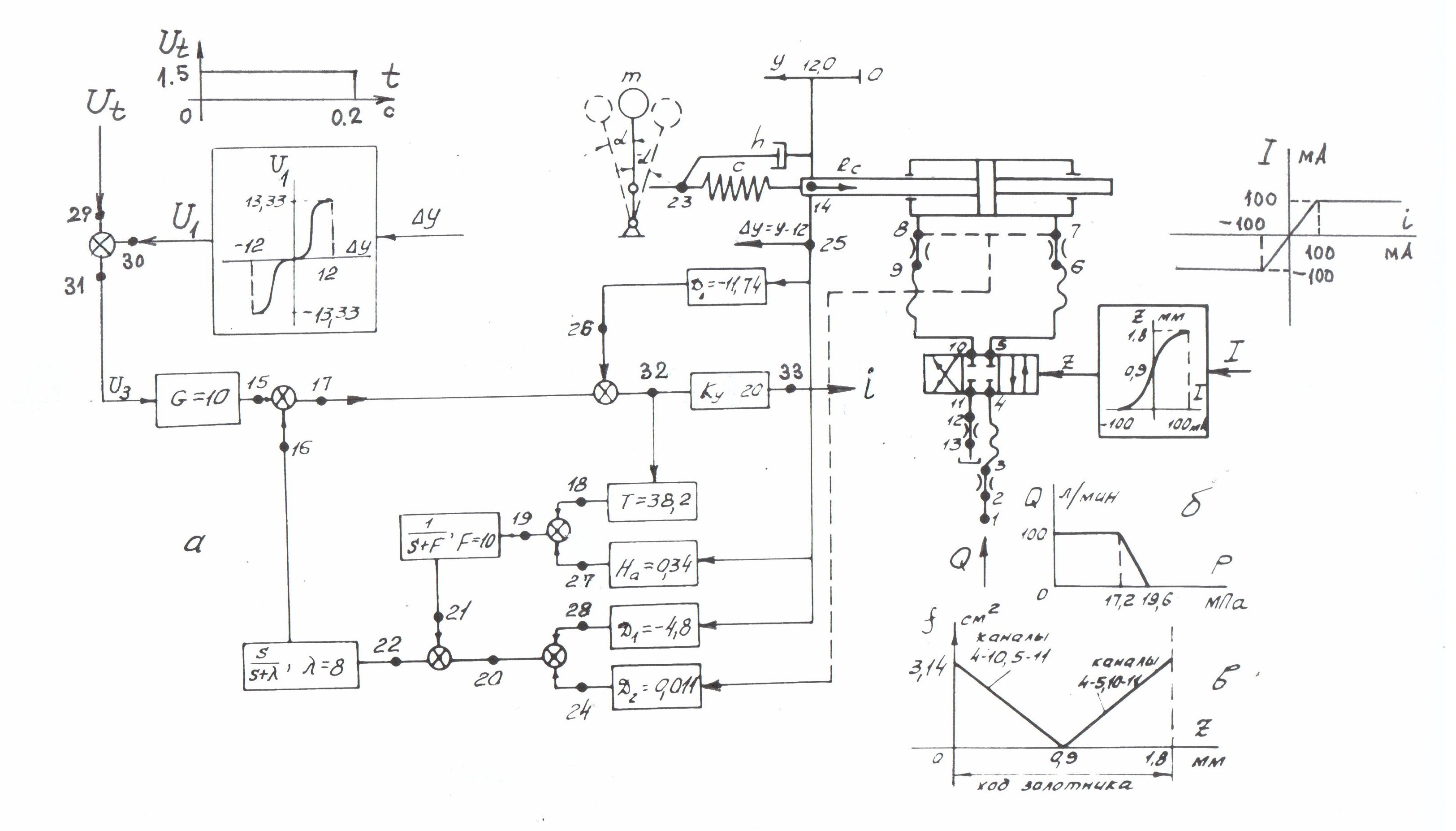
Рис. 3. Схема гидропривода испытательного стенда с электромеханической системой управления
Гидропривод стенда состоит из гидроцилиндра (7–8–14), перемещающего рычажный механизм (14-23) с грузом массой т , имеющий жесткость с и демпфирующие свойства h и описанный апериодическим звеном 2-го порядка; золотникового распределителя (4–5–10–11); трубопроводов (1–2) и (11–12); рукавов высокого давления (3–4), (5–6) и (9–10); дросселей (2–3), (6–7), (8–9) и (12–13); электромеханической системы управления, состоящей из 15-ти линейных динамических звеньев: усилителей (31-15), (25-26), (32-33), (32-18), (25-27), (25-28), (7-8-24), инерционного дифференцирующего звена (22–16), апериодического звена 1-го порядка (19–21), сумматоров (15–17–16), (20–22–21), (27–19–18), (24–20–28), (29-15-30) и (26–32–17); и двух нелинейных звеньев: электромеханического преобразователя z ( I ), обеспечивающего зависимость положения z золотника от тока I следующего вида:
и генератора входного сигнала
где
Основные параметры гидросистемы:
гидроцилиндр
:
диаметр поршня 100 мм, диаметр штока 45 мм, ход поршня 240 мм;
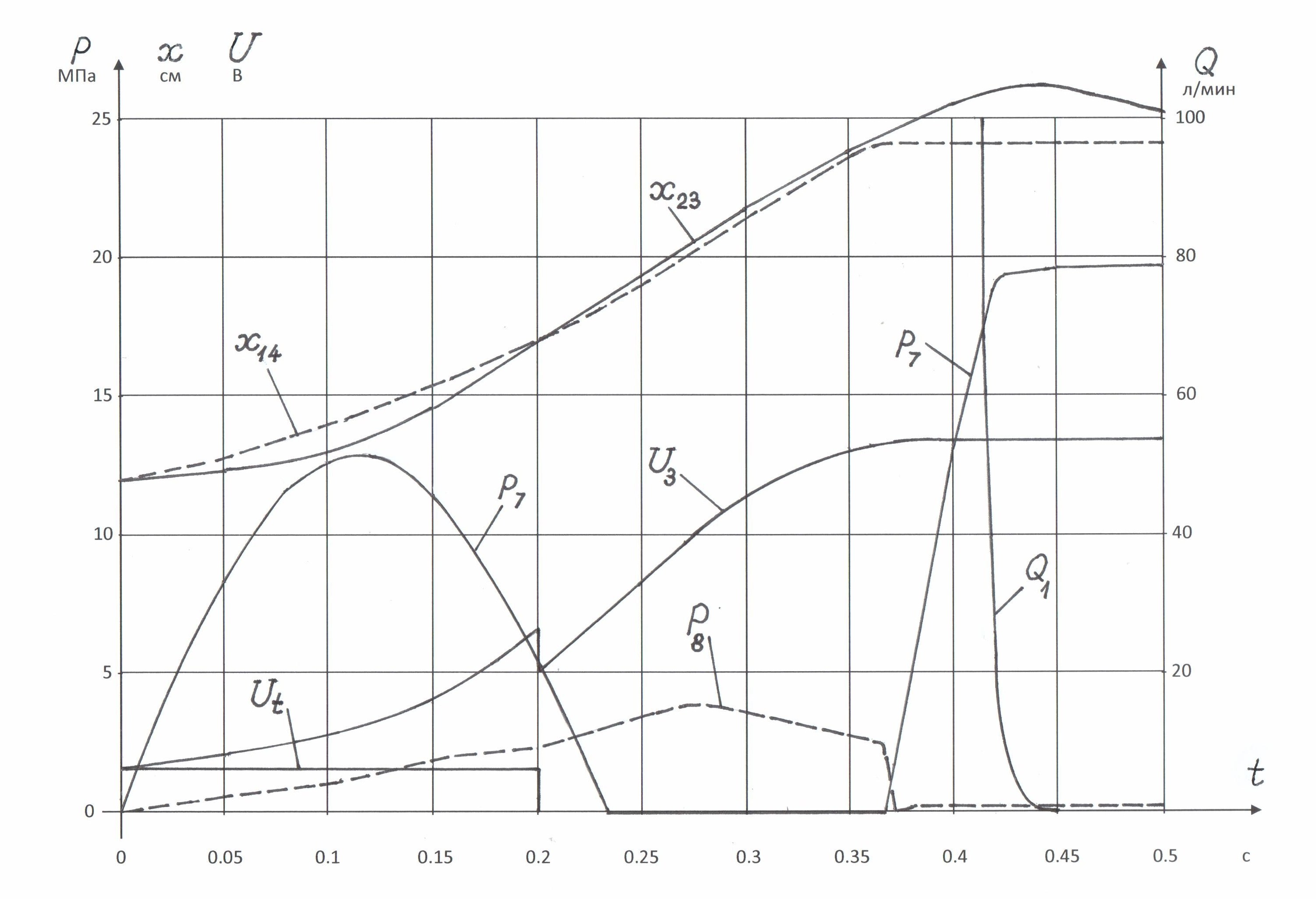
Рис. 4. Динамика гидропривода стенда с электромеханической системой управления
Подобные расчеты и исследования, проведенные на стадии проектирования, позволяют найти оптимальный вариант системы управления для конкретного объекта управления, например, для гидропривода. |
Содержание
>> Инженерная математика
>> Системы управления
>> Динамический анализ системы управления объемным гидроприводом
>> Примеры