|
Системы управления - Динамический синтез - Метод кратных периодов собственных колебаний - Пример
Пример
Предложенный в предыдущем разделе
алгоритм управления
рассмотрим
на конкретной расчетной схеме гидропривода поступательного движения с замкнутой циркуляцией потока (рис. 5), моделируя переходные процессы в
гидросистеме посредством
программы динамического расчета произвольных схем объемного гидропривода HYDRA
(см. раздел "Гидравлические системы.
Динамический анализ").
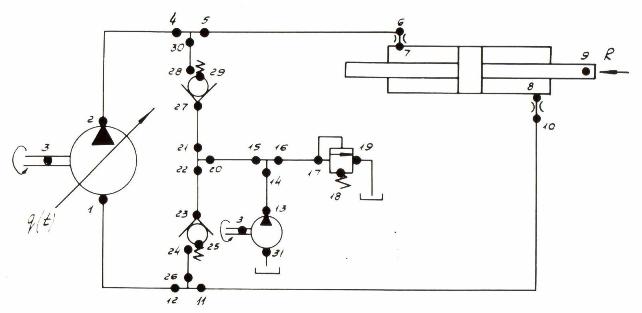
Рис. 5.
Поскольку все необходимые параметры управления (
Т
I
,
Т
II
,
Т
III
,
q
н
,
... ) вычислены заранее и задействованы в подпрограмме PERTR формирования внешних возмущений, по существу реализуется проверка предлагаемого
алгоритма управления путем численного эксперимента (цель которого установить степень адекватности принятых основных положений), поскольку в
системе HYDRA учтены в наиболее общем виде разнообразные нелинейные связи элементов и параметров гидропривода, такие как: переменная упругость
полостей гидроцилиндра, потери давления по длине трубопроводов и в местных сопротивлениях, утечки рабочей жидкости из полостей насоса, работа
системы подпитки с учетом динамики обратных клапанов и т.д.
Прежде чем оценить степень влияния того или иного фактора на параметры управления (главным образом, на низшую собственную частоту гидросистемы),
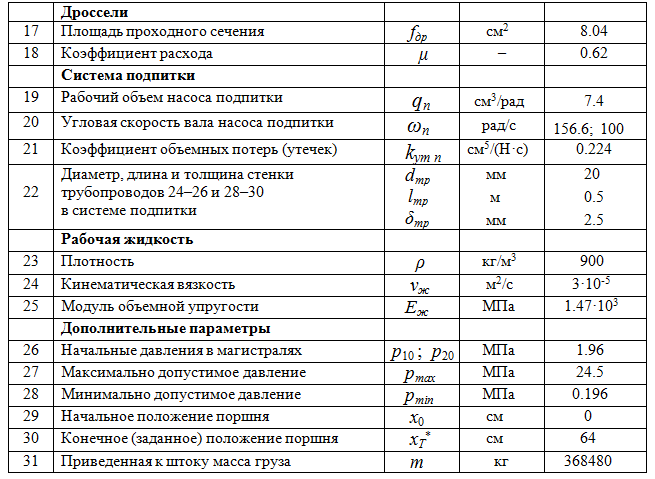
рассмотрим основные параметры гидросистемы, приведенные в табл. 1.
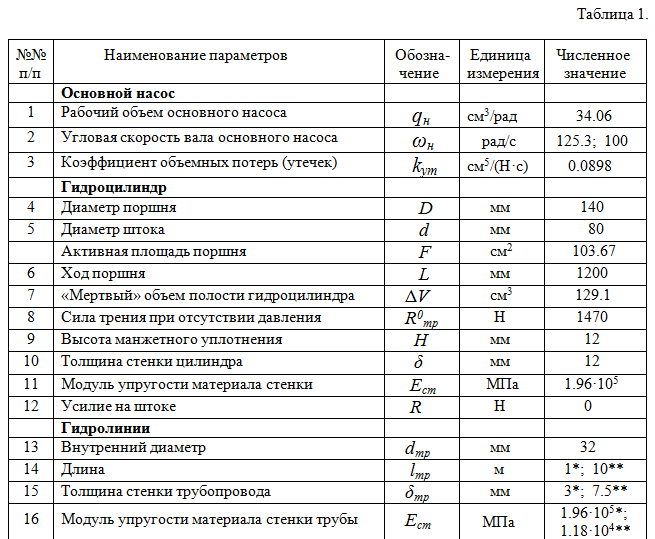
Приведенные модули упругости трубопроводов 5 – 6, 10 – 11, 2 – 4, 12 – 1, 28 – 30, 24 – 26 и полостей гидроцилиндра (все – с рабочей жидкостью)
определяются в соответствии с формулой
(7) предыдущего раздела "Алгоритм"
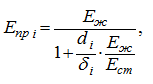
где
d
i
,
δ
i
– диаметр и толщина стенки
i
-ой полости;
Е
ж
– модуль объемной
упругости рабочей жидкости;
Е
ст
– модуль упругости материала стенки полости.
В результате получены следующие значения приведенных модулей упругости:

откуда в соответствии с формулой
(6) предыдущего раздела «Алгоритм»
получим следующие значения коэффициентов упругости напорной и сливной магистралей в начале хода поршня гидроцилиндра:

Коэффициенты пропорциональности составляющих сил трения в полостях гидроцилиндра
k
1
и
k
2
равны [10, 11]:

тогда в соответствии с уравнениями
(9) – (10) предыдущего раздела «Алгоритм»

или
собственная частота гидросистемы равна:
Моделирование по программе HYDRA гидросистемы (рис. 5) дает значение частоты собственных колебаний ~ 6 рад/с.
В
Приложении
показано, что учет переменной упругости гидросистемы,
потерь давления по длине трубопроводов, в местных сопротивлениях и утечек практически не изменяет собственные значения гидросистемы. Таким образом,
расхождение в величине собственной частоты (при расчете «вручную»
а
≈ 6.75 рад/с, при моделировании по программе HYDRA
а
≈ 5.5 – 6 рад/с)
можно объяснить колебательностью системы подпитки, которая при оценке «вручную» не рассматривалась. Поэтому примем для дальнейшего
а
= 6 рад/с. Тогда в соответствии с условиями
(32) предыдущего
раздела «Алгоритм»
Проверку условия
(36) предыдущего раздела «Алгоритм»
для сливной
магистрали здесь проводить не надо, так как при любом выборе
n
выполнение условия
(35) предыдущего раздела «Алгоритм»
обеспечивается системой подпитки, что подтверждается результатами моделирования (см. далее). Поскольку в процессе движения поршня гидроцилиндра
k
упр
1
увеличивается, имеет смысл принять в данном случае
n
= 1, а не 2, и тем самым вдвое сократить время
разгона
Т
I
:

Проверка неравенства
(50) предыдущего раздела «Алгоритм»
дает:
Таким образом, окончательно
Т
I
= 1.05 с.
Поскольку рассматриваемая гидросистема (рис. 5) симметрична, примем
Т
III
=
Т
I
= 1.05 c, тогда в
соответствии с выражением
(49) предыдущего раздела «Алгоритм»
:
следовательно, суммарное время регулирования

На рис. 6 приведены результаты численного эксперимента – моделирования переходных процессов в рассматриваемой гидросистеме посредством программы
HYDRA при реализации управления с найденными выше параметрами.
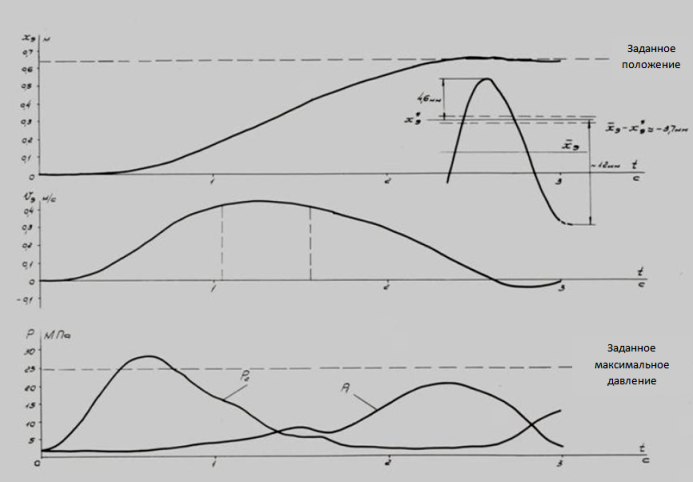
Рис. 6.
Здесь приведены диаграммы изменения во времени перемещения
х
9
и скорости
v
9
поршня гидроцилиндра (узел 9
на рис. 5), давлений
р
1
и
р
2
(соответственно в узлах 1 и 2), а также заданная трапецеидальная зависимость
q
(
t
), приведенная к виду:
Как видно из рис. 6, полностью погасить собственные колебания системы при выходе на режим «установившегося» движения не удается. Кроме того, по
окончании управления имеют место колебания поршня гидроцилиндра относительно некоторого положения равновесия
 ,
отличного от целевой точки
х
9
*
= 64 см на
~
3.7 мм. То есть, точность позиционирования при
полностью задемпфированных колебаниях поршня гидроцилиндра составит около 4 мм. Начало процесса управления (0 ≤
t
≤
Т
I
)
характеризуется забросом давления
р
2
до
~
28 МПа, превышающим заданный уровень максимального давления (25 МПа)
на
~
12%. Указанные отклонения от характера и числовых параметров переходного процесса при выбранной стратегии
управления имеют место по двум основным причинам: наличие существенно нелинейных эффектов (включая влияние системы подпитки, непостоянство упругих
свойств по мере перемещения поршня), в результате которых частота собственных колебаний «плывет», а также некоторыми вычислительными неточностями
в определении параметров управления (например, было принято
n
= 1, хотя на самом деле правая часть неравенства
(32) предыдущего раздела «Алгоритм»
в данном случае равнялась
~
1.052), что привело к несколько завышенному пику давления
р
2
и т.д.
,
отличного от целевой точки
х
9
*
= 64 см на
~
3.7 мм. То есть, точность позиционирования при
полностью задемпфированных колебаниях поршня гидроцилиндра составит около 4 мм. Начало процесса управления (0 ≤
t
≤
Т
I
)
характеризуется забросом давления
р
2
до
~
28 МПа, превышающим заданный уровень максимального давления (25 МПа)
на
~
12%. Указанные отклонения от характера и числовых параметров переходного процесса при выбранной стратегии
управления имеют место по двум основным причинам: наличие существенно нелинейных эффектов (включая влияние системы подпитки, непостоянство упругих
свойств по мере перемещения поршня), в результате которых частота собственных колебаний «плывет», а также некоторыми вычислительными неточностями
в определении параметров управления (например, было принято
n
= 1, хотя на самом деле правая часть неравенства
(32) предыдущего раздела «Алгоритм»
в данном случае равнялась
~
1.052), что привело к несколько завышенному пику давления
р
2
и т.д.
Для уточнения числовых параметров управления гидросистемой для 2-го варианта расчета была принята угловая скорость вала основного насоса
ω
н
= 100 рад/с, откуда
 то есть
n
= 1, следовательно, по-прежнему
то есть
n
= 1, следовательно, по-прежнему

Тогда
Т
= 1.05 + 0.9 + 1.05 = 3 с. Результаты расчета (компьютерного моделирования) представлены на рис. 7.

Рис. 7.
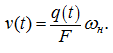
Здесь, как и ранее,
v
9
,
х
9
– скорость и перемещение поршня гидроцилиндра (узел 9),
р
1
,
р
2
– давления на входе и выходе основного насоса (узлы 1 и 2). По сравнению с 1-м расчетным случаем наблюдается значительно
лучшее соответствие заданных и фактических параметров процесса управления. Так, заброс давления
р
2
в данном расчетном случае
составил
~
23 МПа, примерно втрое меньше погрешность позиционирования (отклонение установившегося положения поршня
от заданного
х
9
*
= 64 см составило
~
1.3 мм), снизилась колебательность переходных процессов. Улучшение
показателей процесса управления достигнуто за счет незначительного увеличения времени
Т
II
и общего времени регулирования
Т
(в данном случае
Т
= 3 с по сравнению с 2.605 с в предыдущем примере). Однако и здесь четко прослеживаются собственные
колебания, погасить которые полностью не удается. Последнее обстоятельство, как уже отмечалось выше, связано с наличием нелинейностей в
рассматриваемой гидросистеме (переменная жесткость, колебательность системы подпитки и т.д.), не учитываемых при синтезе параметров управления,
проведенном по линейной модели. Тем не менее «попадание» в окрестность целевой точки позиционирования
х
9
*
с
погрешностью
ε
≈ 1.3 мм для данного типа управления (без введения корректирующих звеньев с обратными связями по положению, скорости и т.д.)
может рассматриваться как приемлемое. Повышение точности позиционирования, включая улучшение демпфирующих свойств гидросистемы реально может быть
достигнуто за счет введения «точного» управления с помощью соответствующим образом выбранных корректирующих звеньев.
Как уже отмечалось выше, в
Приложении
показано, что учет переменных
коэффициентов упругости, потерь давления по длине магистралей и в местных сопротивлениях, утечек рабочей жидкости почти не оказывает влияния на
значения собственных частот, однако имеющиеся расхождения в характере и численных значениях параметров рассматриваемых переходных процессов
(планируемых при синтезе управления и «фактических» при численном эксперименте) свидетельствуют о необходимости учета системы подпитки при
построении алгоритма управления, хотя бы на уровне задания статической характеристики подпиточных обратных клапанов. Поэтому рассмотрим еще один
расчетный случай, причем собственную частоту гидросистемы будем определять с учетом статической характеристики обратного клапана в системе
подпитки. Для этого уравнение расходов
[см. систему уравнений (5) предыдущего раздела «Алгоритм»]
в сливной магистрали гидросистемы запишем в виде:

где
Q
n
– расход подпитки через обратный клапан, равный в соответствии с его статической характеристикой:
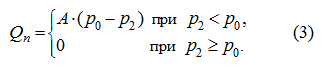
где
А
– угловой коэффициент статической характеристики,
р
0
– давление подпитки.
С учетом (2) и (3) математическая модель динамики гидросистемы при разгоне при срабатывании обратного клапана в системе подпитки примет вид:
тогда получим следующее характеристическое уравнение:

решая которое, получим собственные значения рассматриваемой системы. Нетрудно видеть, что при
А
= 0 (то есть без учета обратного клапана
в системе подпитки) получим уравнение, решение которого есть (1). В общем случае характеристическое уравнение (5) имеет корни:
λ
1
= 0, соответствующий постоянной составляющей переходного процесса, и три корня кубического уравнения, решаемого обычно
численно. Используя значения параметров гидросистемы (табл. 1), получим следующее характеристическое уравнение:

откуда
λ
1
= 0.
Известно, что среди корней кубического уравнения, по крайней мере, один – вещественный. Найдем его
итерационным методом
:

где
 – значение
λ
2
на
n
-ой итерации.
– значение
λ
2
на
n
-ой итерации.
С точностью
ε
= 0.001 искомый корень равен
λ
2
= – 375.357 и соответствует быстрозатухающей составляющей собственного
решения уравнений (4) (постоянная времени ~0.003 с). Собственные значения, определяющие колебательность системы, находятся из квадратного
уравнения, полученного путем деления многочлена (6) на двучлен
λ
(
λ +
375.357 )
:
λ
2
+ 0.043
λ
+ 29.348 = 0, (8)
λ
3,4
≈ – 0.0215 ± 5.42
i
, (9)
откуда собственная частота гидросистемы равна
а
= 5.42 рад/с = 0.862 Гц. Найденное значение практически совпадает с наименьшим наблюденным
(5.46 рад/с) в результате моделирования динамики рассматриваемой гидросистемы по программе HYDRA. Коэффициент демпфирования
ν
= 0.0215
свидетельствует о слабом затухании собственных колебаний (логарифмический декремент в данном случае составляет
 ).
Следовательно, с одной стороны остается справедливой оценка переходного процесса по упрощенной модели
(16) – (18) предыдущего раздела «Алгоритм»
, а с другой
– представляет интерес рассмотрение еще одного расчетного варианта, для которого параметры управления равны:
а
= 5.46 рад/с,
ω
н
= 100 рад/с; тогда по условиям
(32) и (50)
предыдущего раздела «Алгоритм»
:
).
Следовательно, с одной стороны остается справедливой оценка переходного процесса по упрощенной модели
(16) – (18) предыдущего раздела «Алгоритм»
, а с другой
– представляет интерес рассмотрение еще одного расчетного варианта, для которого параметры управления равны:
а
= 5.46 рад/с,
ω
н
= 100 рад/с; тогда по условиям
(32) и (50)
предыдущего раздела «Алгоритм»
:
 и
и
 откуда
n
= 1, и следовательно,
откуда
n
= 1, и следовательно,

Результаты моделирования последнего расчетного варианта приведены на рис. 8.
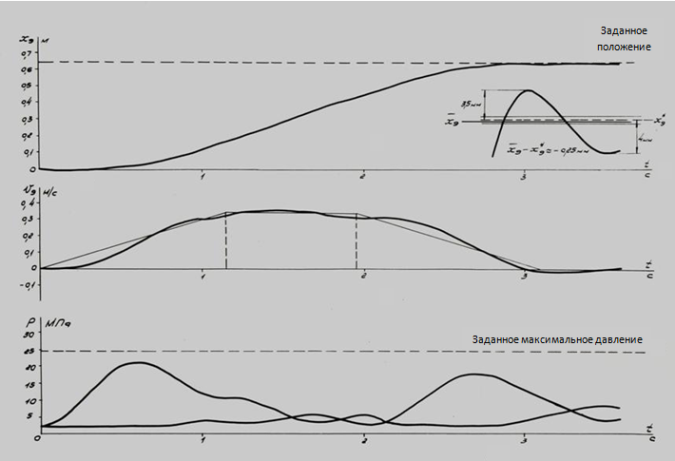
Рис. 8.
Здесь получена требуемая точность позиционирования 0.5 мм (отклонение равновесного положения поршня гидроцилиндра
от заданного
х
9
*
= 64 см составило 0.25 мм), однако в силу малого демпфирования гидросистемы имеют место
колебательные процессы по окончании процесса регулирования (
t
>
T
). Забросы давлений не превышают заданного уровня.
Рассмотренные примеры показывают, что на этапе «грубого» управления принципиально возможна реализация предложенного алгоритма кратных периодов
собственных колебаний, однако наличие ряда существенно нелинейных эффектов не позволяет достаточно точно определить собственную частоту
гидросистемы. Так, переменность упругих свойств привода по мере движения поршня гидроцилиндра приводит к изменению частоты собственных колебаний,
и означает, что реальная система не полностью адекватна линейной модели с постоянными коэффициентами. Кроме того, гидросистема с объемным
регулированием слабо демпфирована. Поэтому для достижения высокой точности позиционирования необходимо:
1) увеличить степень демпфирования гидропривода;
2) ввести корректирующие звенья на этапе «точного» управления с обратными связями по положению и скорости поршня, а возможно и по ускорению
(давлению в полостях гидроцилиндра).
Не исключено, что решение обеих задач может быть достигнуто путем введения соответствующих обратных связей.
|