Общая схема решения
Приведенные выше уравнения статики отдельных гидроэлементов содержат ряд существенных нелинейностей, из-за которых решение соответствующей системы уравнений в замкнутой форме (аналитически) невозможно. Поэтому для статического расчета использована итерационная схема решения, в основе которой лежит
метод Ньютона-Рафсона
. Для применения этого метода необходимы:
- линеаризация уравнений гидроэлементов;
- структурный анализ схемы и минимизация числа неизвестных;
- задание нулевого приближения;
- формирование матрицы коэффициентов линеаризованных уравнений с переменными (вследствие линеаризации в окрестности нулевого приближения) коэффициентами;
- решение на каждой итерации системы линеаризованных уравнений с переменными коэффициентами.
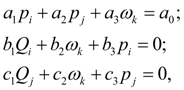
Линеаризация уравнений гидроэлементов проведена на стадии построения алгоритма статического расчета. Нулевое приближение задается при подготовке задачи к решению вместе с исходными данными. Остальные пункты общей схемы решения реализуются программой. Линеаризация уравнений. Пусть задана система нелинейных уравнений вида:
где
Разлагая
Линеаризация уравнений является необходимым подготовительным этапом, в результате которого строится алгоритм и программа статического расчета гидросистем. Для реализации процесса итераций все графические характеристики
Что касается нелинейностей вида
Структурный анализ схемы и минимизация числа неизвестных.
В каждом узле гидросхемы возможны следующие сочетания переменных:
Это позволяет перейти к укрупненной системе переменных:
«силы»
(силы, давления, крутящие моменты),
«скорости»
(линейные или угловые, расход жидкости),
«перемещения»
(линейные или угловые), которые индексируются по номерам узлов схемы.
где
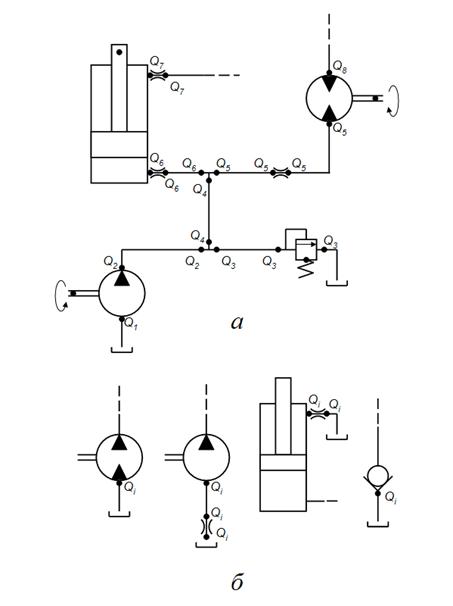
В качестве примера на рис. 4 а представлена произвольная гидросхема с нумерацией расходов в узлах, из которой видно, что фактически число неизвестных расходов равно 8, в то время как общее число узлов, в которых требуется определить эти расходы, равно 18. Отметим, что таким образом будут пронумерованы расходы на всех участках схемы, кроме тех, в которые жидкость поступает из бака. Поэтому, помимо расходов на выходе указанных элементов следует также пронумеровать и расходы во входных линиях ряда элементов, соединенных с гидробаком (рис. 4 б ).
а – в узлах схемы, б – во входных линиях гидроэлементов
Алгоритм нумерации переменных сводится к следующему. Сначала «просматривается» набор элементов схемы. Затем в соответствии с введенной идентификацией базовых гидроэлементов анализируется тип элемента, в зависимости от которого и нумеруются расходы и скорости:
1)
для насоса
порядковый номер получает расход (подача) на выходе (в узле
j
); если вход насоса (узел
i
) соединен с баком, то порядковый номер присваивается и расходу на входе;
2)
для гидромотора и гидроцилиндра
порядковые номера получают расход в узле
j
и скорость в узле
k
; если узел
i
соединен с баком, то расход в узле
i
также получает порядковый номер;
3)
для тройника
: при делении потока порядковые номера получают расходы в узлах
j
и
k
; при суммировании потоков порядковый номер получает только расход в узле
k
;
4)
для дросселя и клапана
порядковый номер получает расход в узле
i
, если он соединен с баком;
5)
для дизеля
порядковый номер получает угловая скорость в узле
j
.
После этого номер расхода на входе каждого участка присваивается расходам в остальных узлах данного участка.
После нумерации расходов и скоростей нумеруются неизвестные «силы» и «перемещения», в результате чего получается новая система неизвестных, в которой первыми пронумерованы «скорости», затем – «силы» и наконец – «перемещения». Как показывает анализ, размерность новой системы неизвестных в среднем на 30 – 40% меньше, что приводит к сокращению времени решения задачи в 3 – 4 раза.
В результате структурного анализа схемы каждому ее узлу М ставится в соответствие тройка чисел
Формирование матрицы коэффициентов.
Матрица коэффициентов системы линеаризованных уравнений (22) формируется следующим образом. Идентификатор элемента определяет группу из
L
уравнений (24) данного элемента – субматрицу, коэффициенты которых образуют
L
строк формируемой матрицы. Номерам узлов элемента однозначно соответствуют номера новых неизвестных
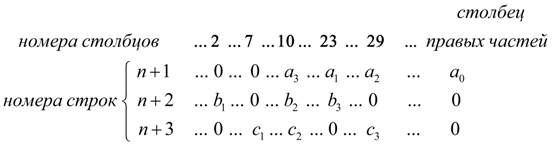
Для иллюстрации процесса формирования матрицы рассмотрим пример. Пусть очередным элементом является гидромотор с номерами узлов i , j , k и пусть к данному моменту времени было сформировано n строк матрицы ( n уравнений). Запишем линеаризованные уравнения гидромотора в общем виде:
которые выбираются в соответствии с идентификатором элемента. Предположим, что в результате структурного анализа схемы неизвестные, входящие в систему уравнений (25), получили следующие номера:
Остальные элементы строки [кроме коэффициентов уравнений (25)] равны нулю. Затем выбирается следующий элемент и т.д. Процесс формирования матрицы продолжается до тех пор, пока не выбраны все элементы схемы. Алгоритм решения системы уравнений. Для статического расчета использована итерационная схема решения, в основе которой лежит метод Ньютона-Рафсона . Система линеаризованных уравнений (22) в матричной форме может быть приведена к виду:
A
[
где
A
[
A
[
где
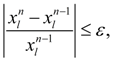
Таким образом, на
n
-ой итерации по значениям
|
Содержание
>> Инженерная математика
>> Гидравлические системы
>> Статический расчет
>> Общая схема решения

 (23)
(23)
 (25)
(25)
 l
= 1,…,
N
. (28)
l
= 1,…,
N
. (28)